Essence
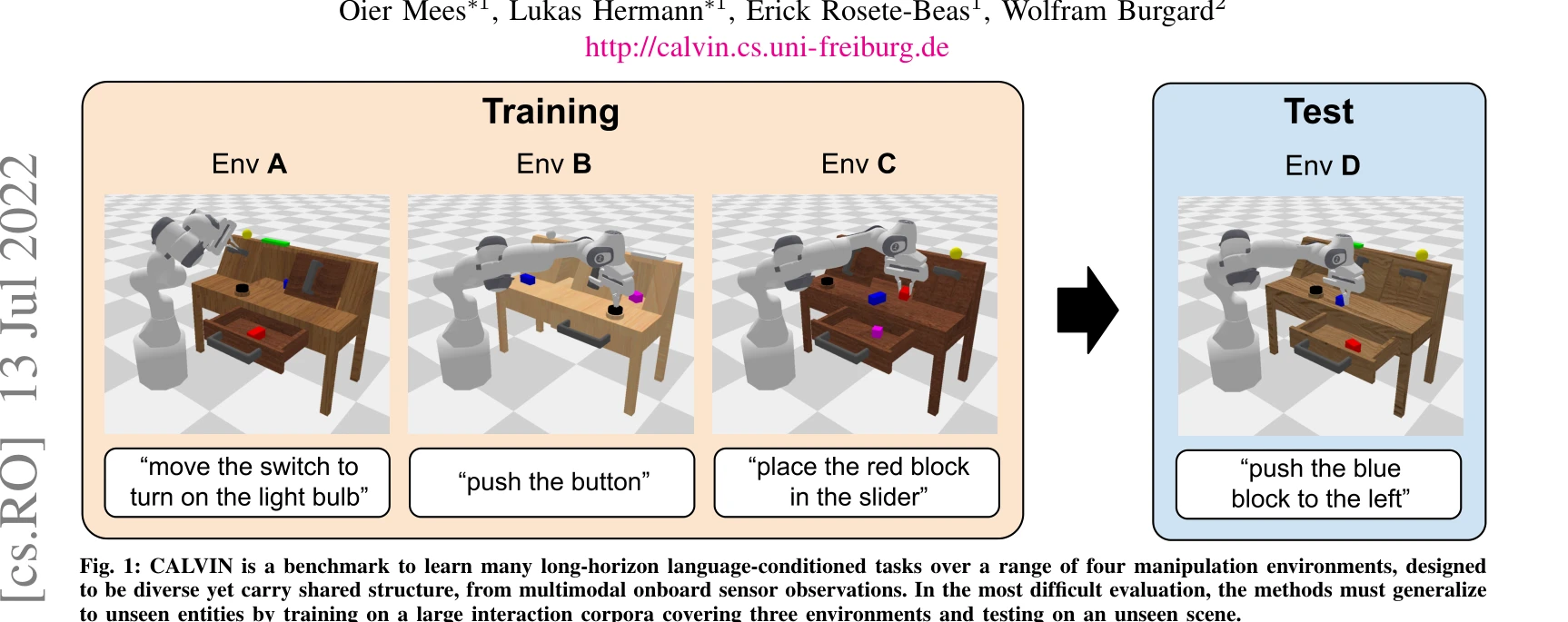
Fig. 1: CALVIN is a benchmark to learn many long-horizon language-conditioned tasks over a range of four manipulation en
CALVIN은 장기간 언어 조건부 로봇 조작 작업을 위한 오픈소스 시뮬레이션 벤치마크로, 자연어 명령을 따라 다단계 조작 작업을 수행하도록 학습하는 에이전트를 평가한다.
저자: Oier Mees, Lukas Hermann, Erick Rosete-Beas, Wolfram Burgard | 날짜: 2021-12-06 | URL: https://arxiv.org/abs/2112.03227 📄 PDF
Fig. 1: CALVIN is a benchmark to learn many long-horizon language-conditioned tasks over a range of four manipulation en
CALVIN은 장기간 언어 조건부 로봇 조작 작업을 위한 오픈소스 시뮬레이션 벤치마크로, 자연어 명령을 따라 다단계 조작 작업을 수행하도록 학습하는 에이전트를 평가한다.
Fig. 1: CALVIN is a benchmark to learn many long-horizon language-conditioned tasks over a range of four manipulation en
총평: CALVIN은 자연어 기반 장기 로봇 조작의 표준화된 첫 벤치마크로서 로봇 학습 커뮤니티에 중대한 기여를 한다. 높은 평가 난이도와 유연한 설계로 미래 연구를 촉진할 것으로 기대되나, 시뮬레이션 환경의 한계와 현실 적용 검증이 필요하다.