Essence
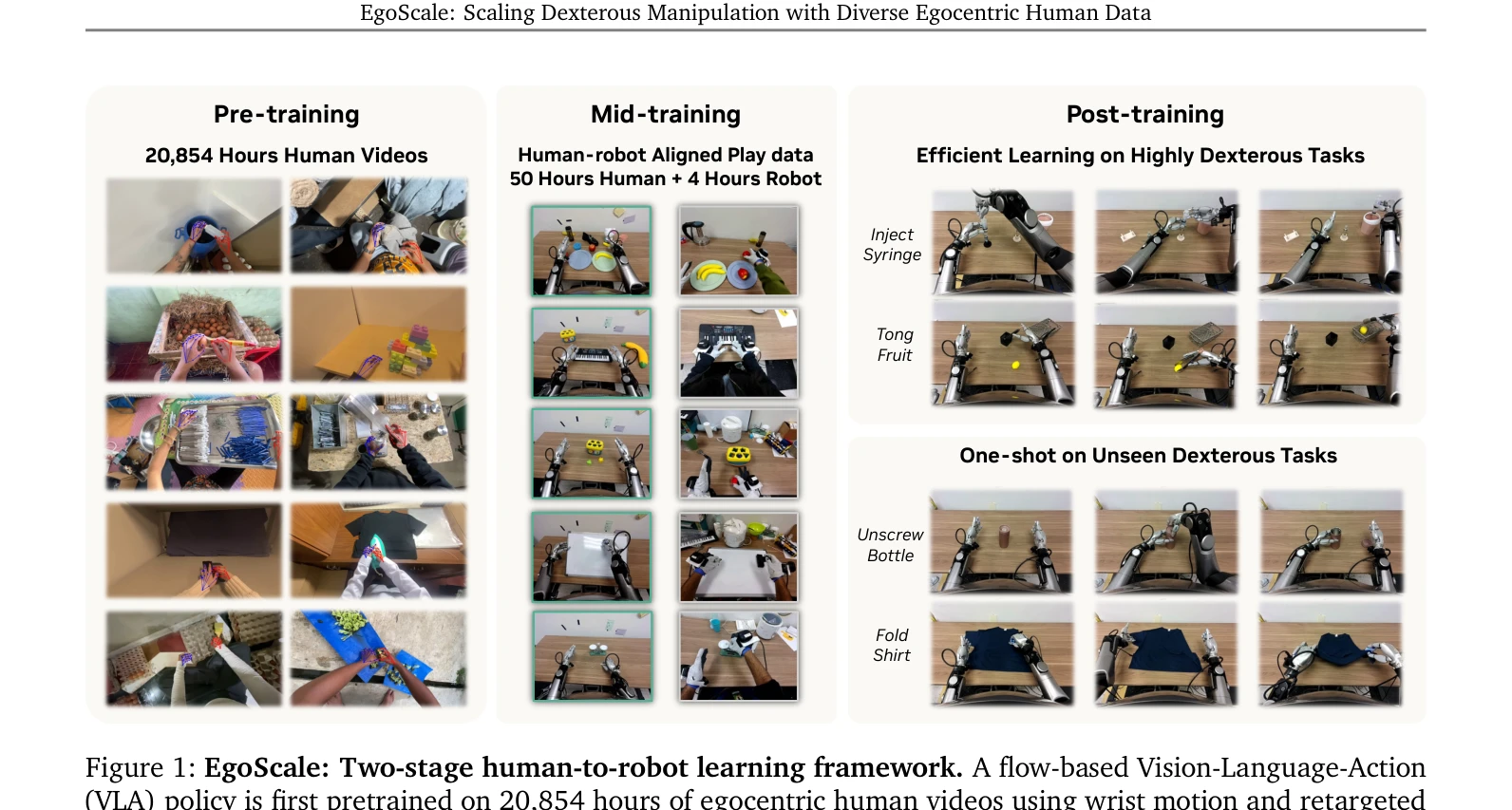
Figure 1: EgoScale: Two-stage human-to-robot learning framework. A flow-based Vision-Language-Action
20,854시간의 대규모 이고센트릭 인간 비디오 데이터로 VLA 모델을 사전학습한 후 소량의 정렬된 인간-로봇 중간학습 데이터로 미세조정하여 22-DoF 손가락 조작 로봇에서 54% 성공률 향상을 달성했다.
저자: Ruijie Zheng, Dantong Niu, Yuqi Xie, Jing Wang, Mengda Xu, Yunfan Jiang, Fernando Castañeda, Fengyuan Hu, You Liang Tan, Letian Fu, Trevor Darrell, Furong Huang, Yuke Zhu, Danfei Xu, Linxi Fan | 날짜: 2026-02-18 | URL: https://arxiv.org/abs/2602.16710 📄 PDF
Figure 1: EgoScale: Two-stage human-to-robot learning framework. A flow-based Vision-Language-Action
20,854시간의 대규모 이고센트릭 인간 비디오 데이터로 VLA 모델을 사전학습한 후 소량의 정렬된 인간-로봇 중간학습 데이터로 미세조정하여 22-DoF 손가락 조작 로봇에서 54% 성공률 향상을 달성했다.
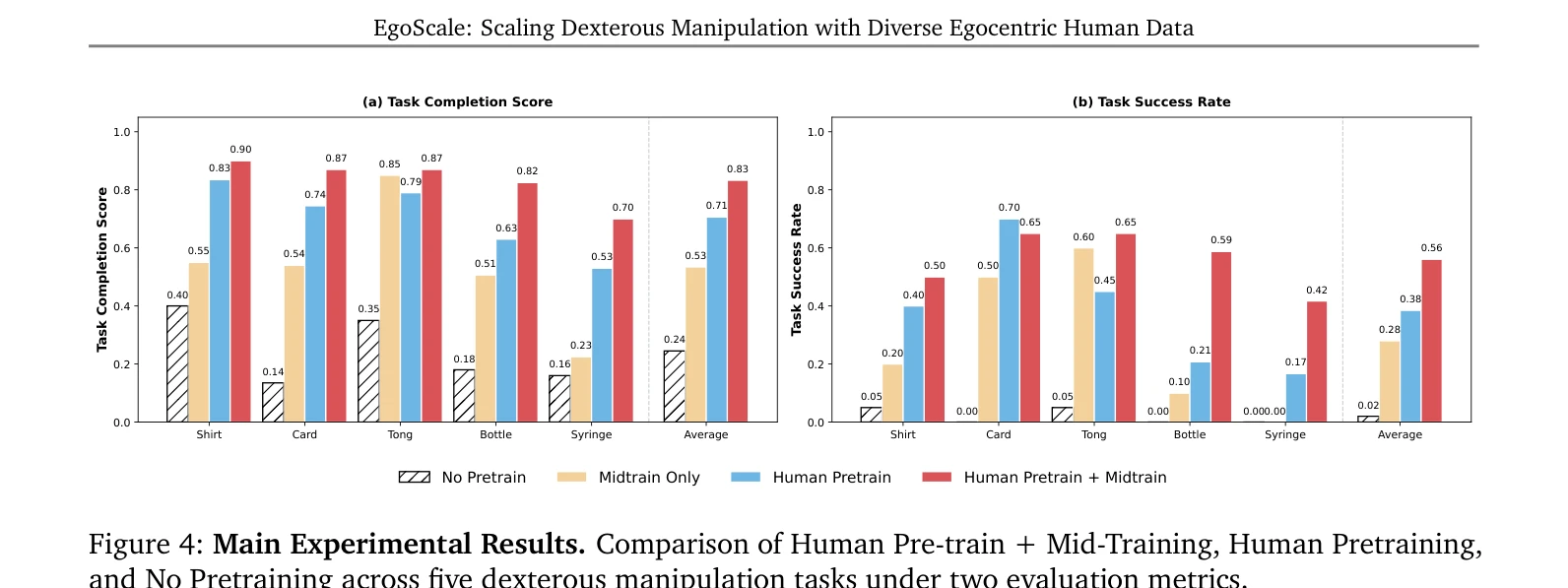
Figure 4: Main Experimental Results. Comparison of Human Pre-train + Mid-Training, Human Pretraining,
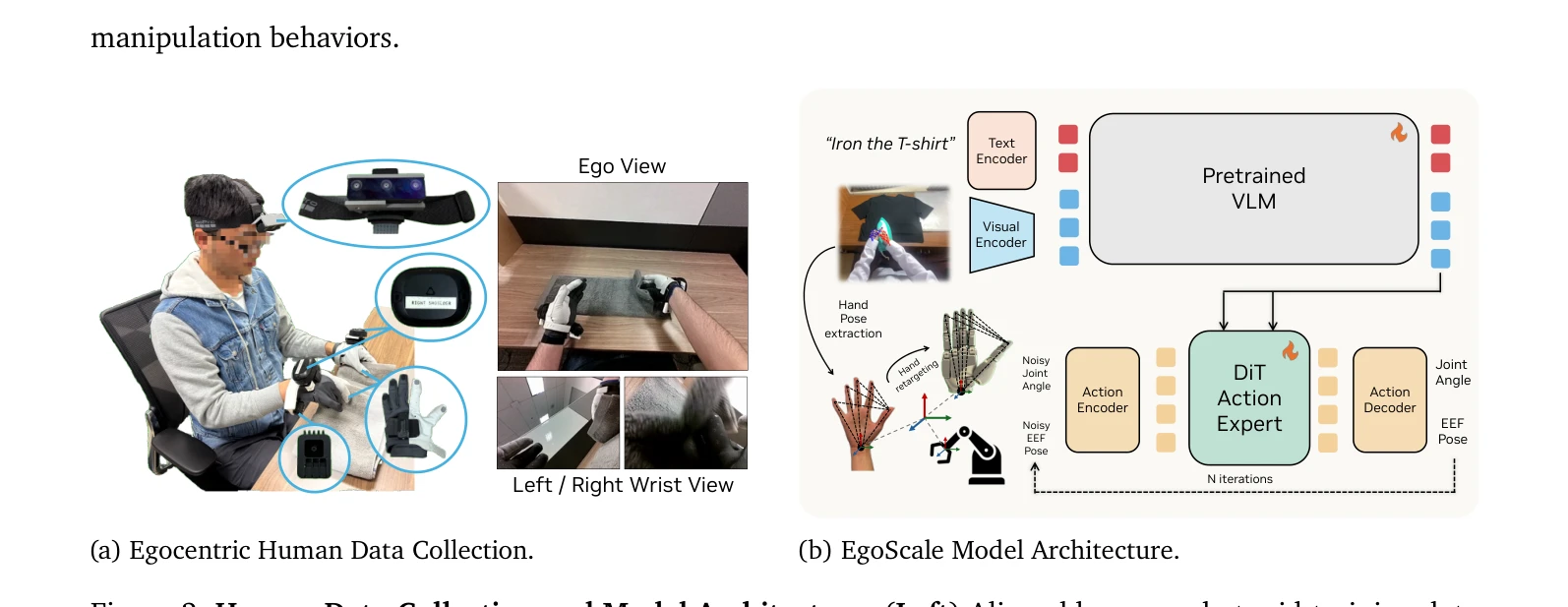
Figure 2: Human Data Collection and Model Architecture. (Left) Aligned human-robot mid-training data
총평: 본 논문은 대규모 이고센트릭 인간 데이터의 스케일링 법칙을 최초로 입증하고 이를 고자유도 손가락 조작에 효과적으로 적용한 중요한 기여를 한다. 명확한 실험 설계와 강력한 실증 결과(54% 성공률 향상, 일회성 전이)는 인간 데이터 기반 로봇 학습의 실행 가능성을 확실히 보여주지만, 포즈 추정 노이즈, 중간학습 데이터 수집 비용, 태스크/플랫폼 다양성 제한이 실제 배포 확대를 위해 해결해야 할 과제로 남아있다.