Essence
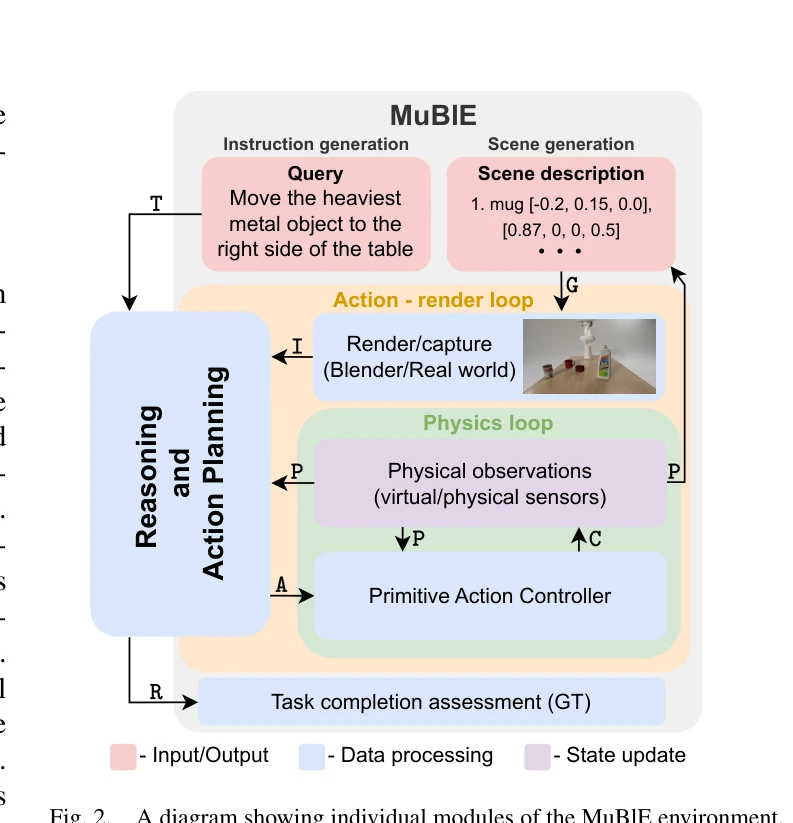
Fig. 2.
MuBlE는 MuJoCo 물리 엔진과 Blender 렌더러를 결합한 로봇 조작 시뮬레이션 환경으로, 현실적인 시각 관찰과 정확한 물리 모델링을 동시에 제공하여 장기 과제 계획을 지원한다. SHOP-VRB2 벤치마크와 함께 시각-물리 속성을 모두 고려하는 다단계 추론 작업 평가를 가능하게 한다.
저자: Michal Nazarczuk, Karla Stepanova, Jan Kristof Behrens, Matej Hoffmann, Krystian Mikolajczyk | 날짜: 2025-03-04 | URL: https://arxiv.org/abs/2503.02834 📄 PDF
Fig. 2.
MuBlE는 MuJoCo 물리 엔진과 Blender 렌더러를 결합한 로봇 조작 시뮬레이션 환경으로, 현실적인 시각 관찰과 정확한 물리 모델링을 동시에 제공하여 장기 과제 계획을 지원한다. SHOP-VRB2 벤치마크와 함께 시각-물리 속성을 모두 고려하는 다단계 추론 작업 평가를 가능하게 한다.
Fig. 1.
Fig. 2.
총평: MuBlE는 로봇 조작 연구의 중요한 격차를 해결하여 고품질 렌더링과 정확한 물리를 동시에 제공하며, SHOP-VRB2 벤치마크는 폐쇄 루프 추론에 필요한 멀티모달 데이터를 제공한다. Sim-to-real 검증과 실제 로봇 실험을 통해 실질적 가치를 입증하며 오픈소스 공개로 연구 커뮤니티에 기여한다.