Essence
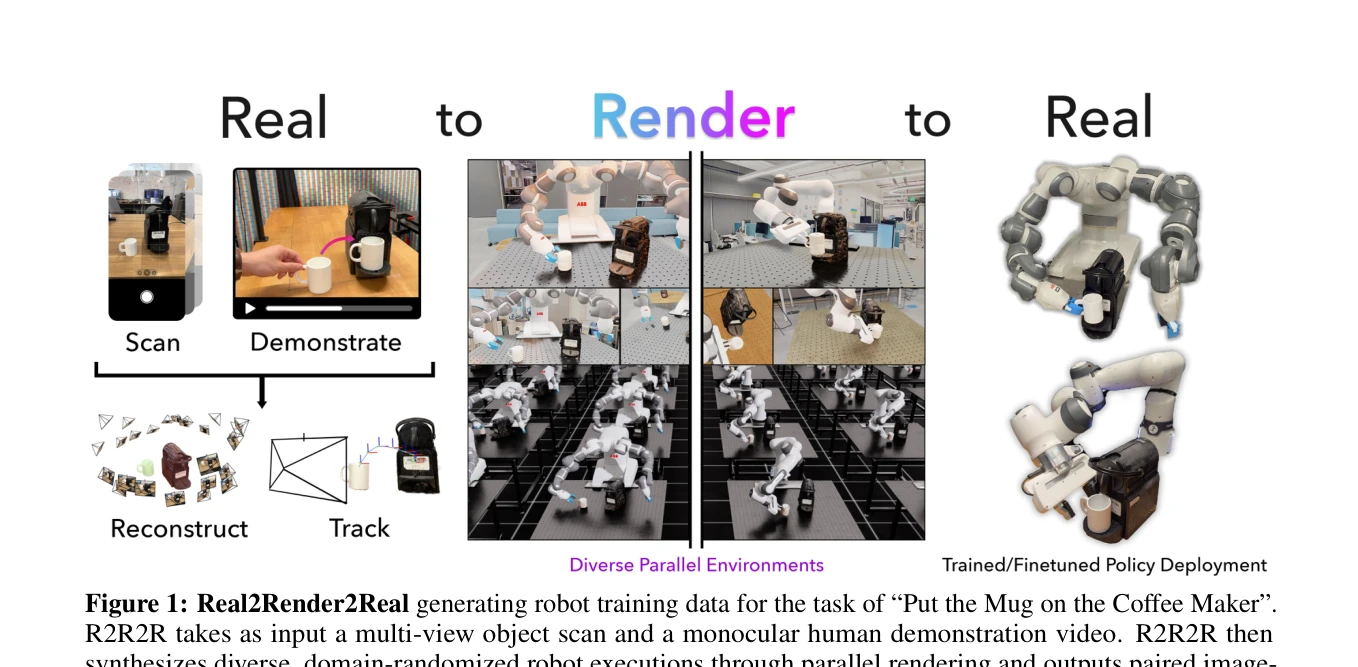
Figure 1: Real2Render2Real generating robot training data for the task of “Put the Mug on the Coffee Maker”.
Real2Render2Real (R2R2R)은 스마트폰으로 촬영한 3D 객체 스캔과 단일 인간 시연 영상으로부터 동역학 시뮬레이션이나 로봇 하드웨어 없이 대규모 로봇 훈련 데이터를 생성하는 파이프라인이다.
저자: Justin Yu, Letian Fu, Huang Huang, Karim El-Refai, Rares Andrei Ambrus, Richard Cheng, Muhammad Zubair Irshad, Ken Goldberg | 날짜: 2025-05-14 | URL: https://arxiv.org/abs/2505.09601 📄 PDF
Figure 1: Real2Render2Real generating robot training data for the task of “Put the Mug on the Coffee Maker”.
Real2Render2Real (R2R2R)은 스마트폰으로 촬영한 3D 객체 스캔과 단일 인간 시연 영상으로부터 동역학 시뮬레이션이나 로봇 하드웨어 없이 대규모 로봇 훈련 데이터를 생성하는 파이프라인이다.
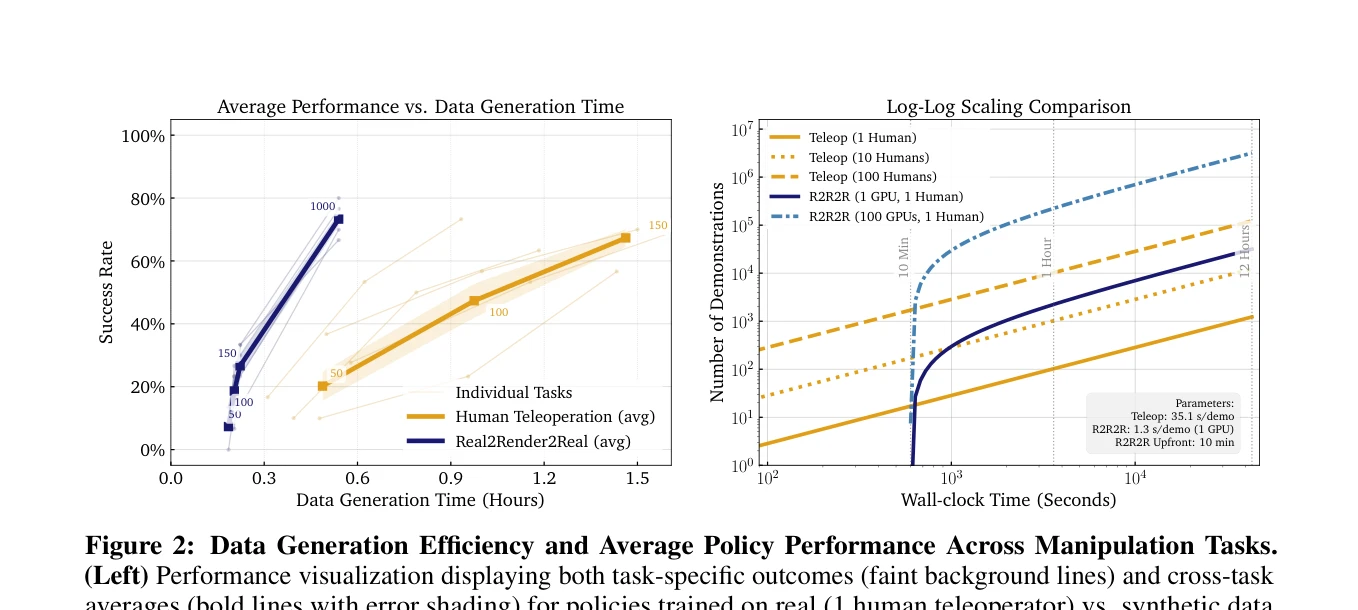
Figure 2: Data Generation Efficiency and Average Policy Performance Across Manipulation Tasks.
Figure 1: Real2Render2Real generating robot training data for the task of “Put the Mug on the Coffee Maker”.
총평: R2R2R은 동역학 시뮬레이션과 로봇 하드웨어라는 두 가지 주요 병목을 제거하여 스마트폰 입력만으로 대규모 로봇 훈련 데이터를 생성하는 획기적인 방법을 제시한다. 단일 인간 시연으로 150배 데이터의 성능을 달성한다는 실증적 결과와 VLA/모방 학습 호환성은 로봇 학습 확장의 실질적 경로를 제시하는 중요한 기여이다.