저자: Zhendong Wang, Zhaoshuo Li, Ajay Mandlekar, Zhenjia Xu, Jiaojiao Fan, Yashraj Narang, Linxi Fan, Yuke Zhu, Yogesh Balaji, Mingyuan Zhou, Ming-Yu Liu, Yu Zeng | 날짜: 2024-10-28 | URL: https://arxiv.org/abs/2410.21257 📄 PDF
Essence
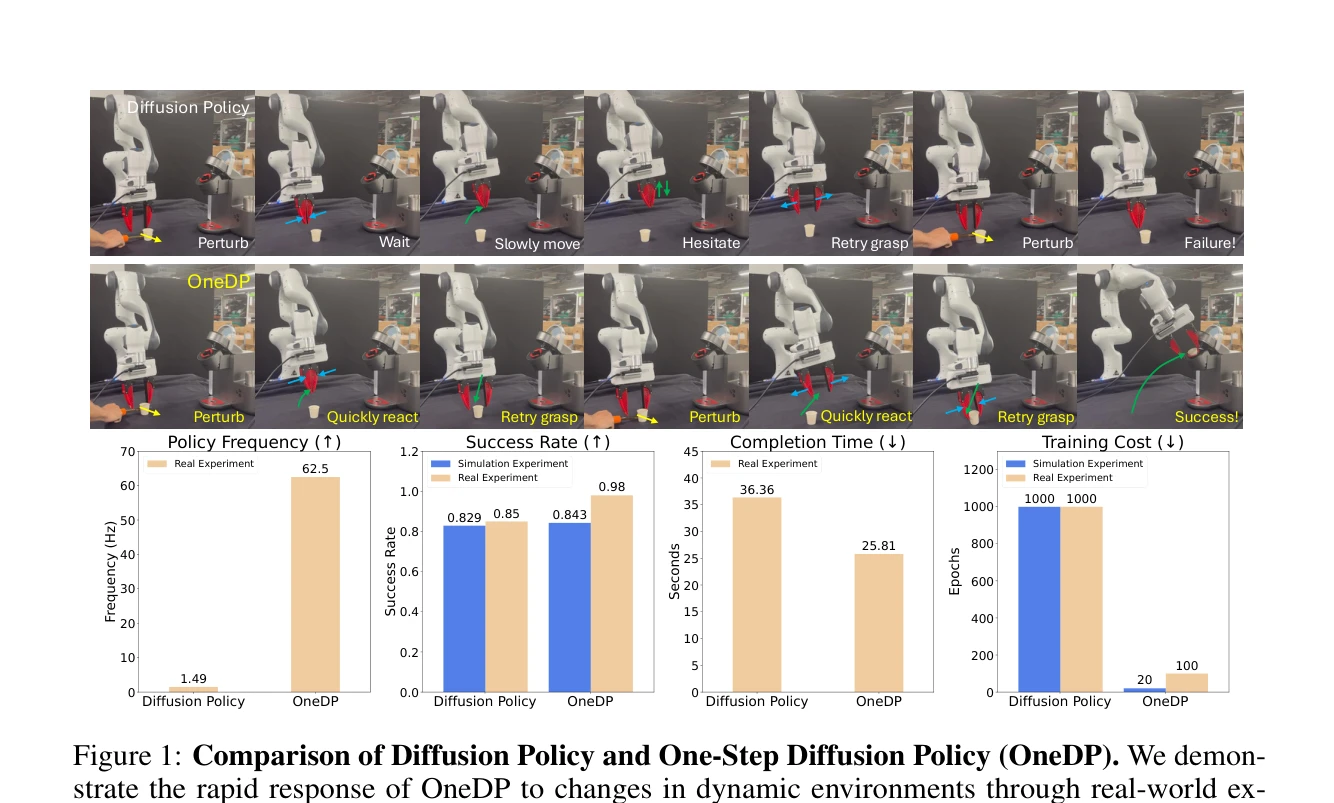
Figure 1: Comparison of Diffusion Policy and One-Step Diffusion Policy (OneDP). We demon-
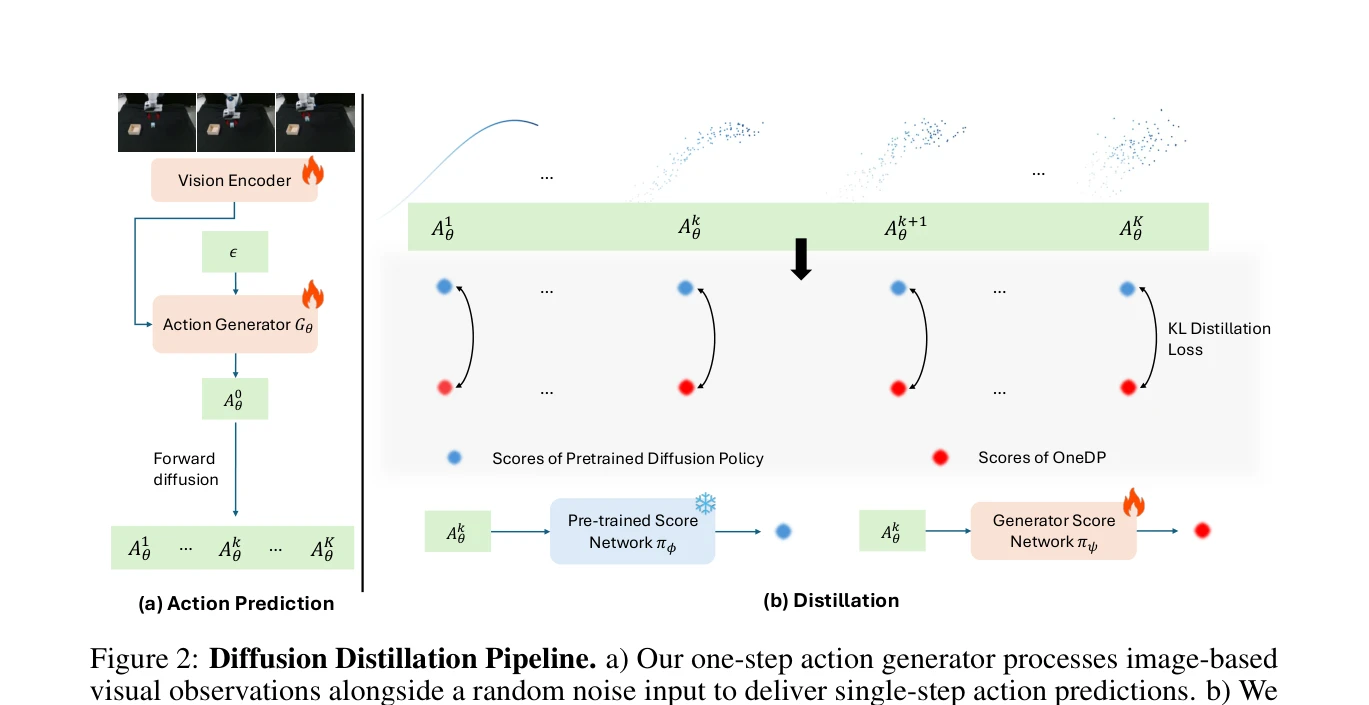
One-Step Diffusion Policy (OneDP)는 사전 학습된 diffusion policy의 지식을 단일 단계 action generator로 distill하여 로봇 제어의 추론 속도를 42배 향상시킨다. KL divergence 최소화를 통해 원본 policy 분포와의 정렬을 보장하면서도 2%-10%의 추가 학습 비용만 필요하다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: One-Step Diffusion Policy는 diffusion 기반 로봇 제어의 추론 속도 문제를 우아하게 해결하는 혁신적 접근법이다. 실험 결과가 강력하고 방법론이 명확하며 실제 로봇 애플리케이션의 가능성을 크게 확대한 중요한 연구다.