Essence
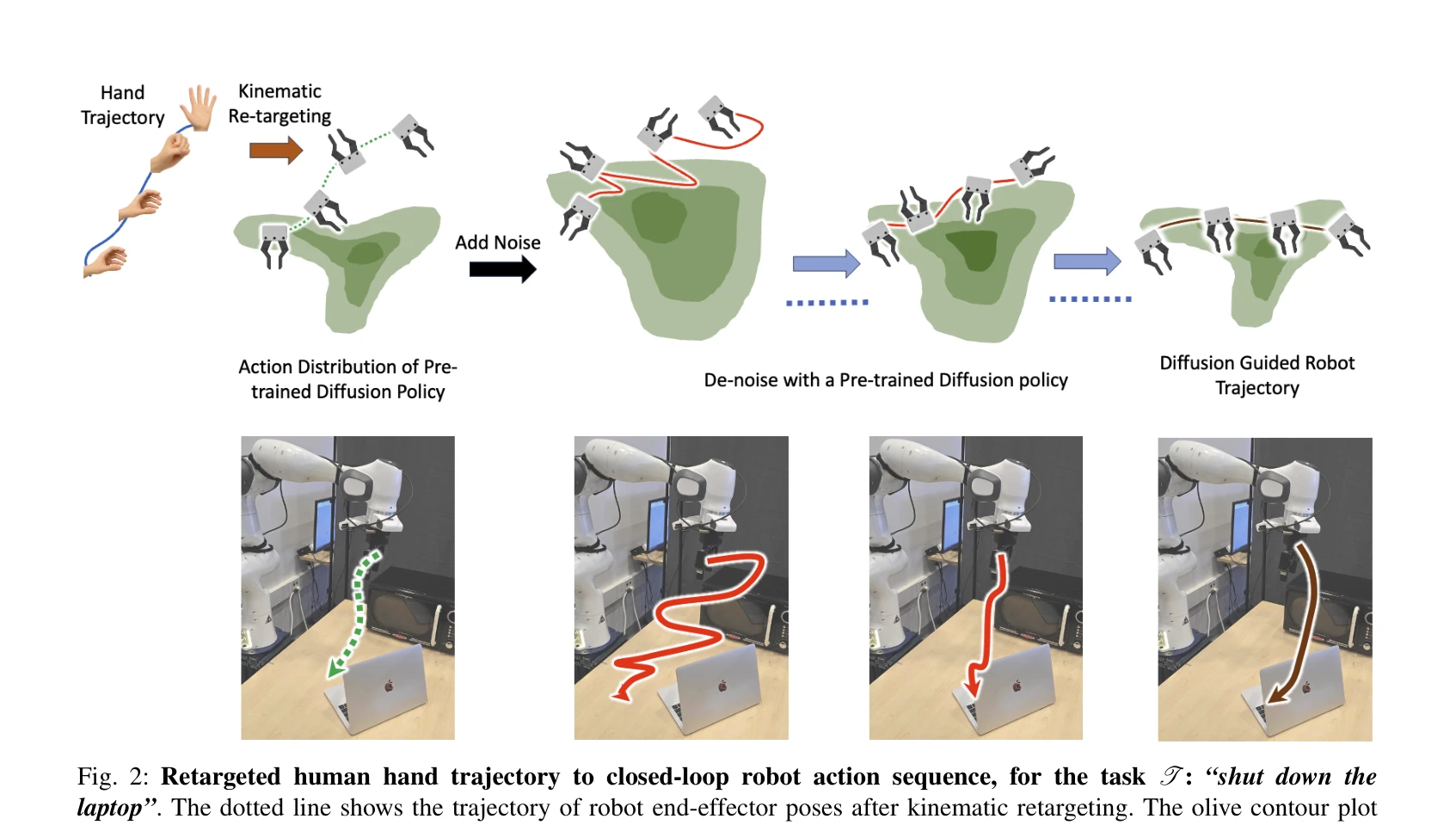
Fig. 2: Retargeted human hand trajectory to closed-loop robot action sequence, for the task T : “shut down the
DemoDiffusion은 단일 인간 시연으로부터 로봇이 조작 작업을 수행할 수 있도록 하는 방법으로, kinematic retargeting으로 얻은 궤적을 pre-trained diffusion policy를 이용해 개선한다.
저자: Sungjae Park, Homanga Bharadhwaj, Shubham Tulsiani | 날짜: 2025-06-25 | URL: https://arxiv.org/abs/2506.20668 📄 PDF
Fig. 2: Retargeted human hand trajectory to closed-loop robot action sequence, for the task T : “shut down the
DemoDiffusion은 단일 인간 시연으로부터 로봇이 조작 작업을 수행할 수 있도록 하는 방법으로, kinematic retargeting으로 얻은 궤적을 pre-trained diffusion policy를 이용해 개선한다.
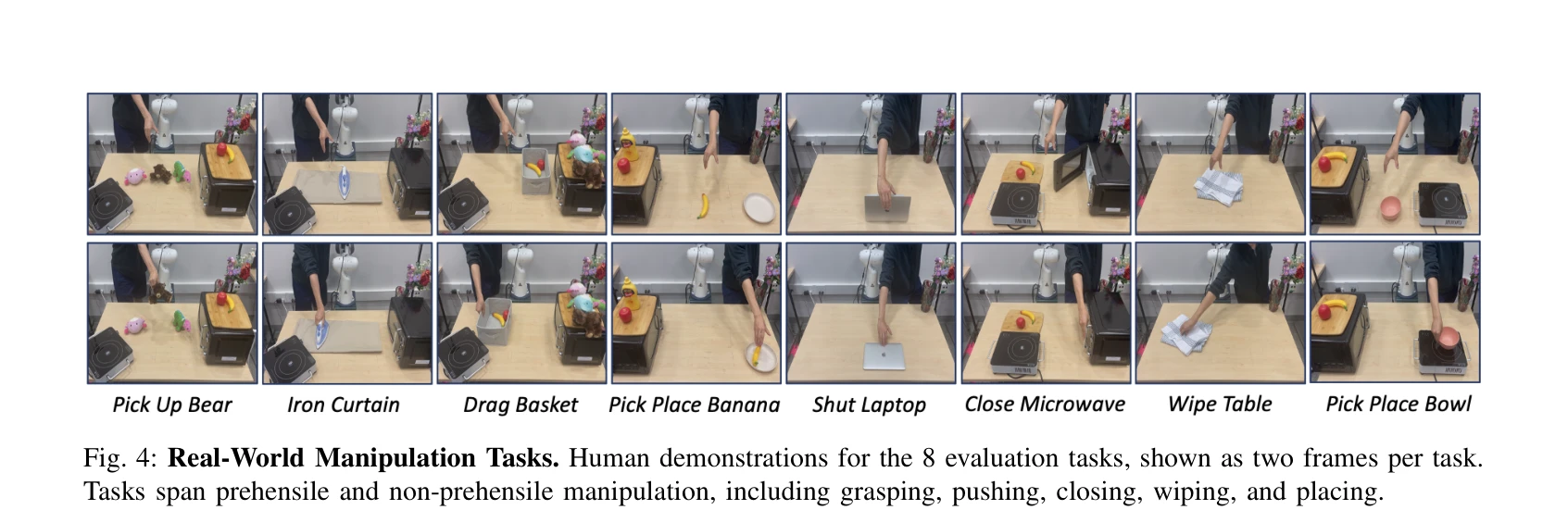
Fig. 4: Real-World Manipulation Tasks. Human demonstrations for the 8 evaluation tasks, shown as two frames per task.
Fig. 2: Retargeted human hand trajectory to closed-loop robot action sequence, for the task T : “shut down the
총평: DemoDiffusion은 pre-trained diffusion policy를 kinematic retargeting의 개선에 활용하는 우아한 접근법으로, 실제 환경에서 인간 시연만으로 로봇 조작을 가능하게 한다. 실세계 성능(83.8%)과 기존 방법 대비 우월성을 입증했으며, 실용적 배포 관점에서 높은 가치를 가진다.