Essence
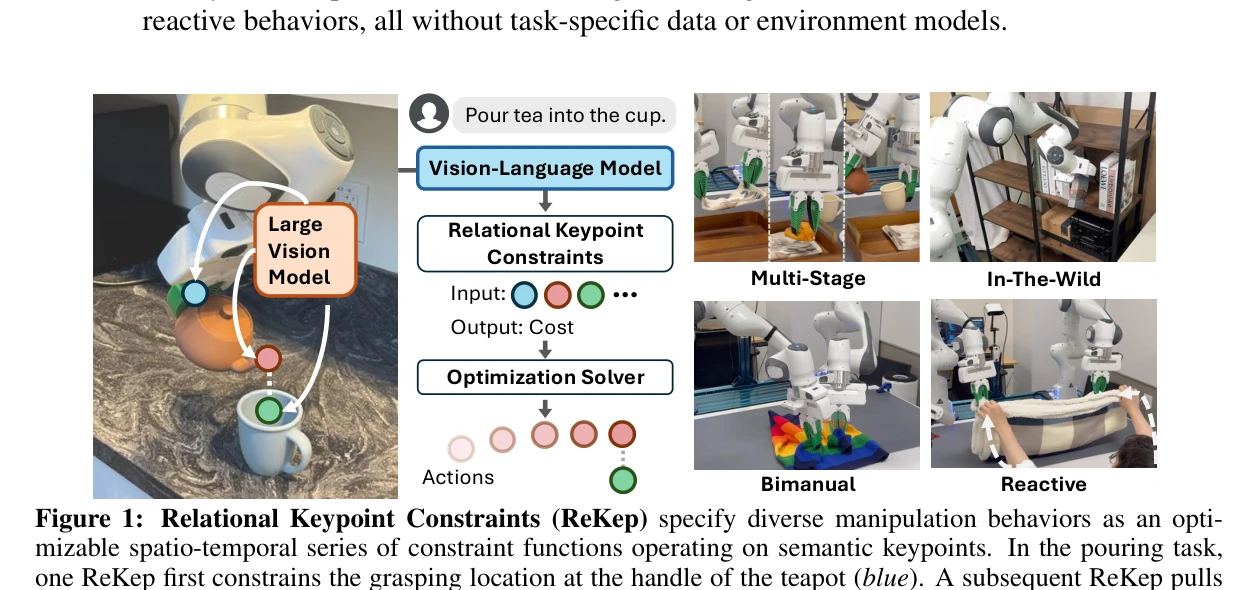
Figure 1: Relational Keypoint Constraints (ReKep) specify diverse manipulation behaviors as an opti-
ReKep는 로봇 조작 작업을 3D 키포인트를 입력으로 하는 Python 함수 형태의 제약 조건으로 표현하며, 대규모 비전 모델과 비전-언어 모델을 활용하여 자동으로 이러한 제약을 생성하고 계층적 최적화로 실시간 로봇 제어를 실현한다.
저자: Wenlong Huang, Chen Wang, Yunzhu Li, Ruohan Zhang, Li Fei-Fei | 날짜: 2024-09-03 | URL: https://arxiv.org/abs/2409.01652 📄 PDF
Figure 1: Relational Keypoint Constraints (ReKep) specify diverse manipulation behaviors as an opti-
ReKep는 로봇 조작 작업을 3D 키포인트를 입력으로 하는 Python 함수 형태의 제약 조건으로 표현하며, 대규모 비전 모델과 비전-언어 모델을 활용하여 자동으로 이러한 제약을 생성하고 계층적 최적화로 실시간 로봇 제어를 실현한다.
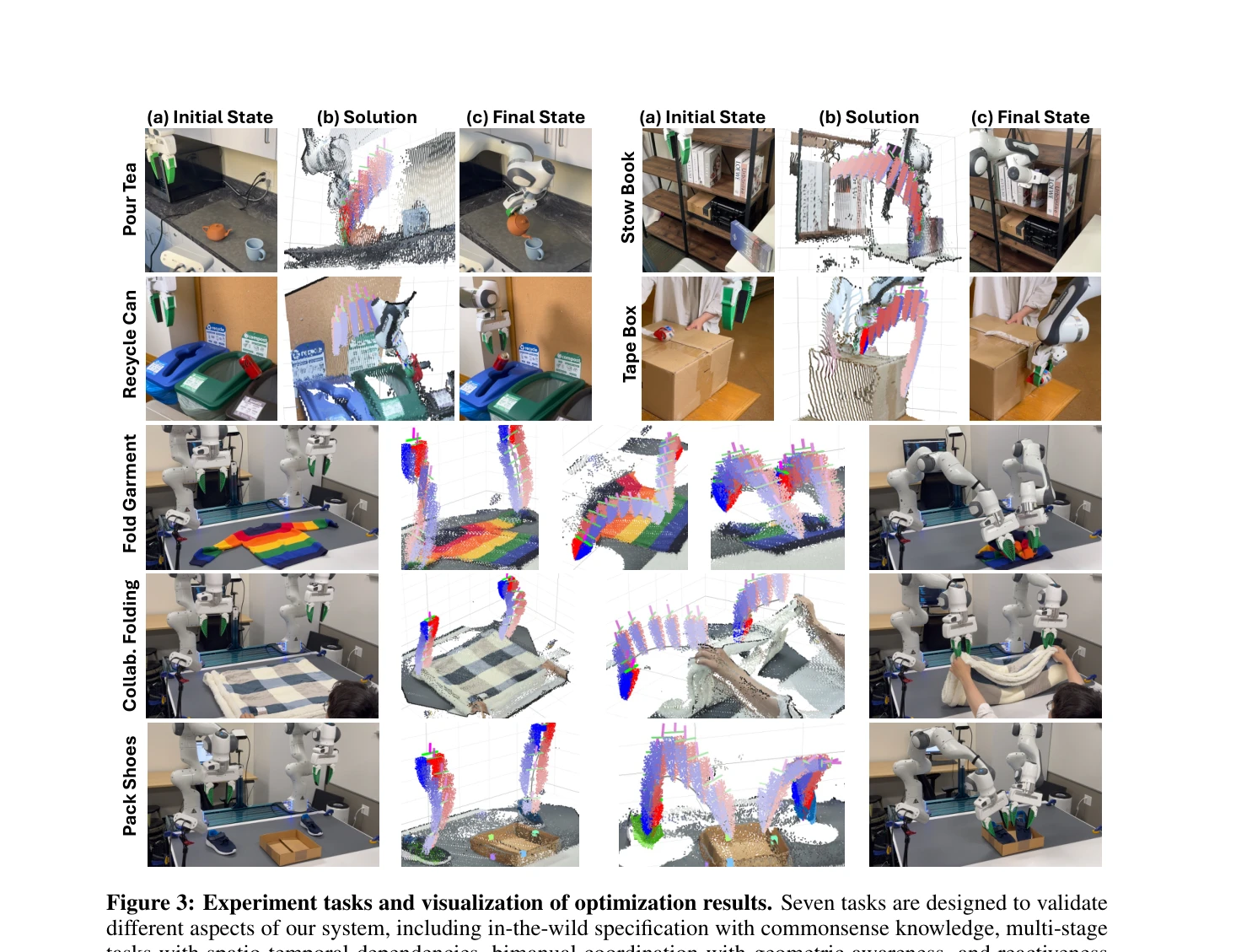
Figure 3: Experiment tasks and visualization of optimization results. Seven tasks are designed to validate
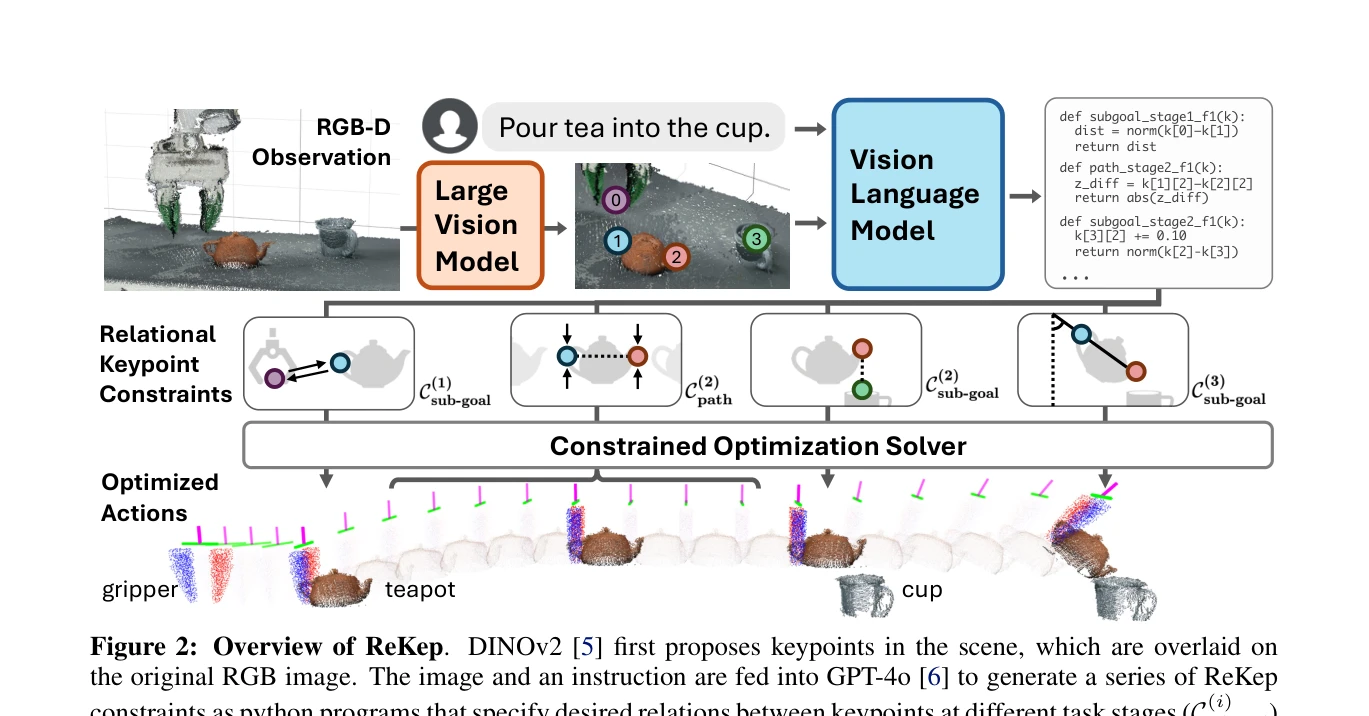
Figure 2: Overview of ReKep. DINOv2 [5] first proposes keypoints in the scene, which are overlaid on
총평: ReKep은 keypoint 기반 제약 표현과 foundation model 기반 자동 생성을 결합하여 일반화 가능하고 실시간 실행 가능한 로봇 조작 시스템을 제시한다. 다양한 작업 실연과 두 가지 로봇 플랫폼 구현으로 실질적 가치를 입증하며, 작업별 데이터 없는 generalist 로봇 구현의 중요한 진전을 나타낸다.