저자: Ruijie Zheng, Yongyuan Liang, Shuaiyi Huang, Jianfeng Gao, Hal Daumé, Andrey Kolobov, Furong Huang, Jianwei Yang | 날짜: 2024-12-13 | URL: https://arxiv.org/abs/2412.10345 📄 PDF
Essence
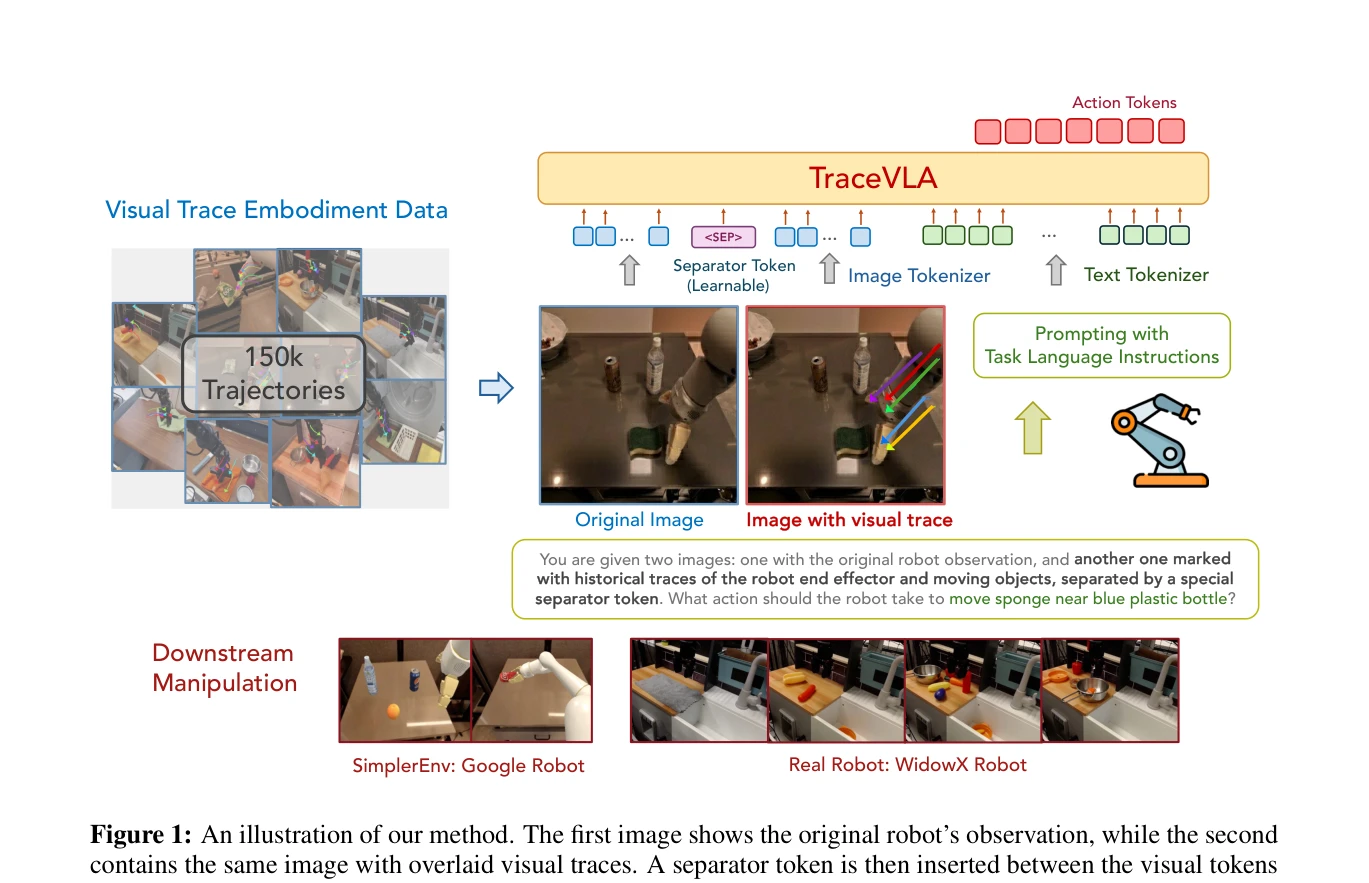
Figure 1: An illustration of our method. The first image shows the original robot’s observation, while the second
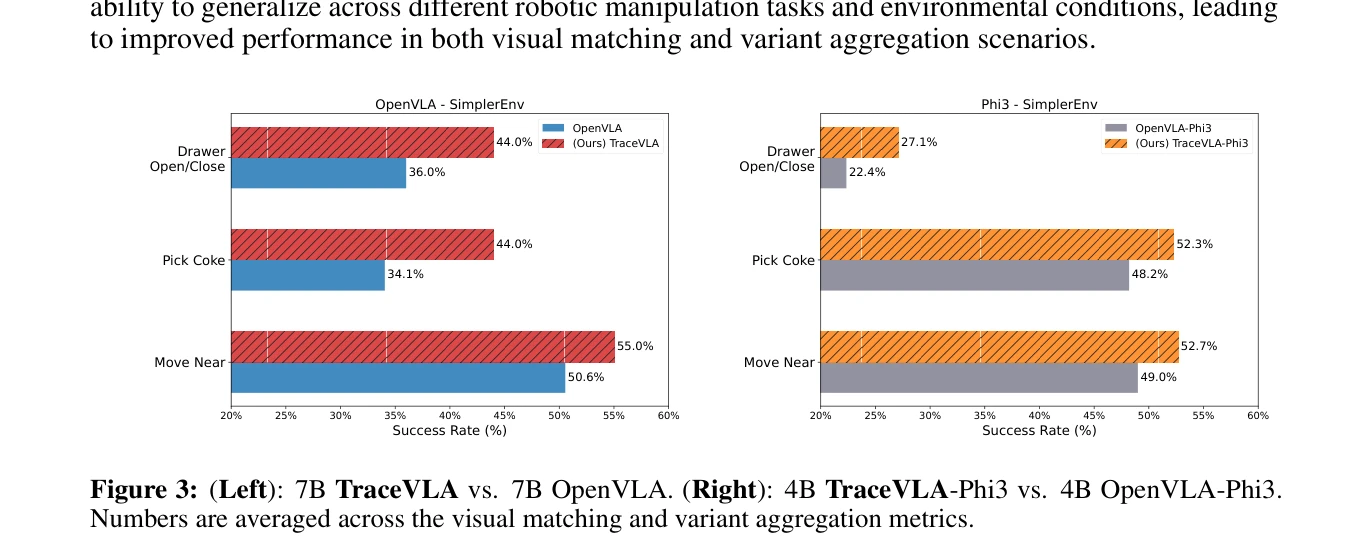
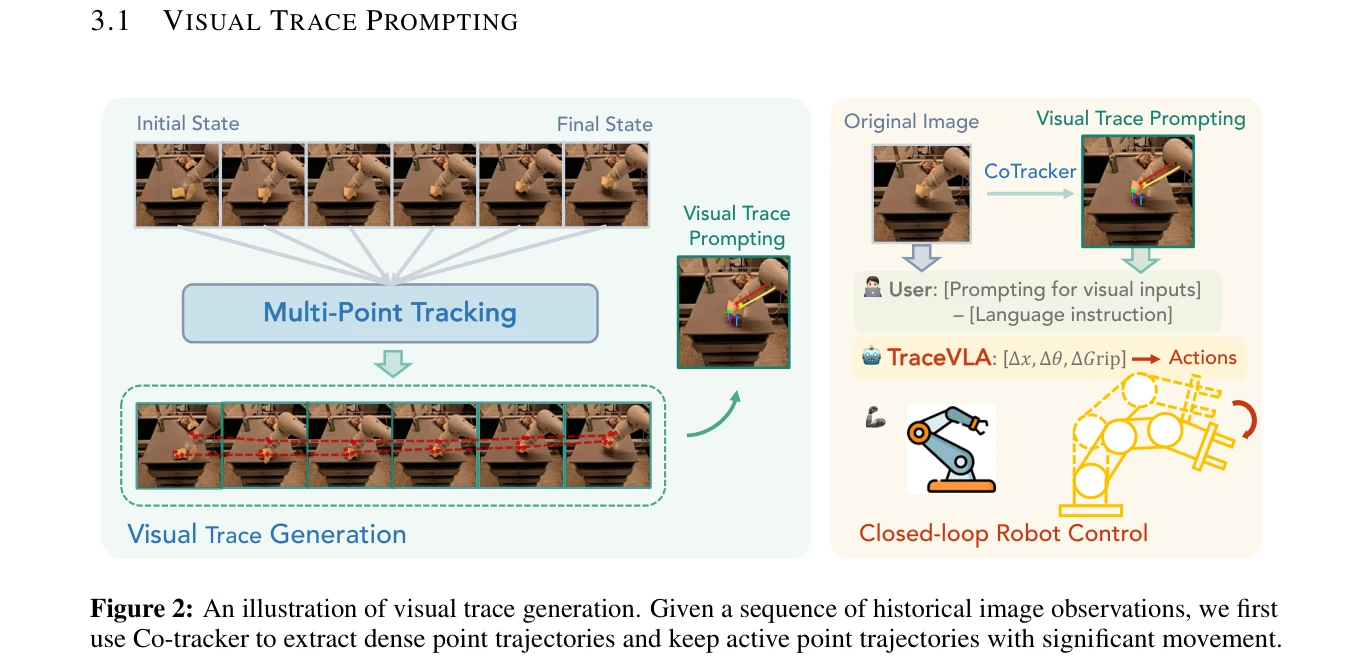
Visual trace prompting 기법을 통해 VLA 모델의 spatial-temporal 인식을 향상시켜 로봇 조작 작업의 성능을 개선한 연구이다. 150K 로봇 조작 궤적 데이터셋을 수집하고 TraceVLA 모델을 개발하여 시뮬레이션과 실제 로봇 환경에서 우수한 성능을 입증했다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: Visual trace prompting은 직관적이면서도 효과적인 기법으로, VLA 모델의 공간-시간 인식을 실질적으로 개선하며 광범위한 실험(시뮬레이션 및 실제 로봇)을 통해 우수한 성능을 일관되게 입증했다. ICLR 2025 게재 논문으로서 로봇 조작 분야의 실질적 기여도가 높다.