Essence
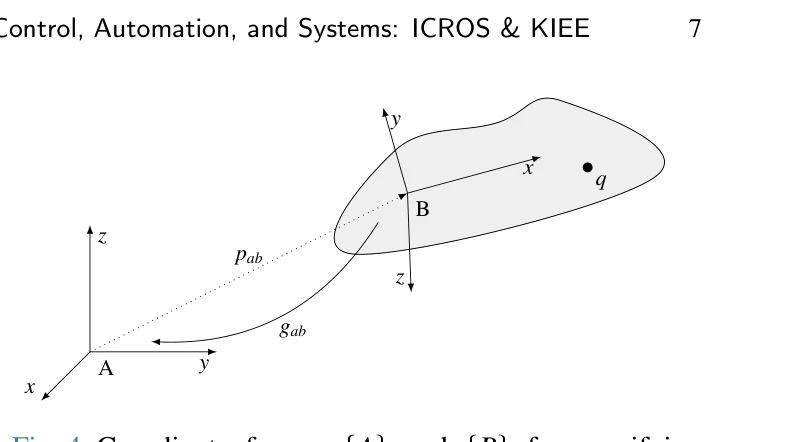
Fig. 4. Coordinate frames {A} and {B} for specifying
본 논문은 로봇 학습 및 제어에서 SE(3) 동형성(equivariance)을 활용하는 심화 튜토리얼 서베이이다. Group theory, Lie groups, SE(3) 등 수학적 기초부터 equivariant neural networks의 로봇 응용까지 포괄적으로 다룬다.
저자: Joohwan Seo, Soochul Yoo, Junwoo Chang, Hyunseok An, Hyunwoo Ryu | 날짜: 2025.03 | DOI: N/A 📄 PDF
Fig. 4. Coordinate frames {A} and {B} for specifying
본 논문은 로봇 학습 및 제어에서 SE(3) 동형성(equivariance)을 활용하는 심화 튜토리얼 서베이이다. Group theory, Lie groups, SE(3) 등 수학적 기초부터 equivariant neural networks의 로봇 응용까지 포괄적으로 다룬다.
Fig. 4. Coordinate frames {A} and {B} for specifying
주요 성과:
• SE(3)-equivariance의 통일된 수학적 프레임워크 제시
• Lie groups, Lie algebras로부터 SE(3) 정의 및 group action의 명확한 설명
• Group convolutional networks와 steerability on SE(3)의 equivariant 신경망 설계 방법론 제공
• Imitation learning과 reinforcement learning에서의 SE(3)-equivariant 모델 적용 사례 검토
• Geometric control 관점에서 SE(3) manifold 상의 제어 설계 기법 소개
• End-to-end SE(3)-equivariant energy-based models와 diffusion 기반 방법의 최신 동향 정리
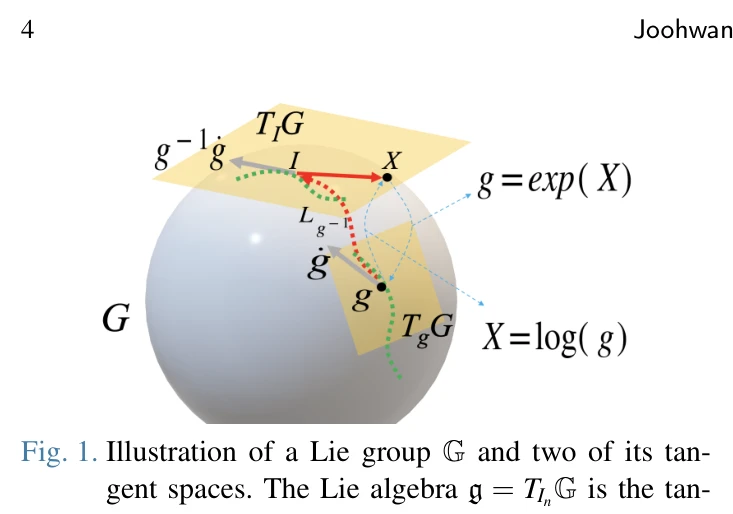
Fig. 1. Illustration of a Lie group G and two of its tan-
• Group theory의 기초 개념(Group, Subgroup, Group action)을 명확히 정의하고 SO(3), SE(3) 등 핵심 그룹 소개
• Lie groups와 Lie algebras의 관계, exponential map과 logarithmic map을 설명하여 군의 지역 구조 해석
• Matrix Lie groups를 통해 rigid body transformations의 수학적 표현 제공
• Group-equivariant neural network의 설계 원리(fiber bundles, representation theory) 설명
• Equivariance 제약을 만족하는 convolutional filters와 linear maps의 구성 방법 제시
• SE(3)-equivariant deep learning 모델의 구체적 구현(point cloud 처리, energy-based models)
• Imitation learning과 reinforcement learning 알고리즘과 equivariance의 결합 방식 논의
• Error functions, Riemannian metrics, velocity errors를 통한 geometric control 설계 원리 설명
• SE(3)-equivariance를 로봇 학습과 제어에 통합하는 포괄적인 튜토리얼 제공으로 기존 산재된 연구들을 체계화
• 로봇 커뮤니티의 다양한 표기법을 통일하여 이해의 장벽 제거
• Group theory 기초부터 최신 딥러닝 응용까지 일관된 수학적 관점으로 설명
• Geometric control과 equivariant deep learning을 연결하는 관점 제시
• 이론적 설명에 중점을 두어 실제 로봇 시스템에서의 구현 및 성능 비교 실험이 부족
• 다양한 로봇 작업(manipulation 외 navigation, perception 등)에서의 equivariance 활용이 제한적으로 다루어짐
• 계산 복잡도 및 확장성 문제에 대한 충분한 분석 부재
• 후속 연구: multi-modal sensor fusion, lifelong learning, 동적 환경에서의 robust equivariant models 개발 필요
총평: 본 논문은 SE(3)-equivariance 관점에서 로봇 학습 및 제어를 다루는 포괄적이고 체계적인 튜토리얼 서베이이다. Group theory 기초부터 최신 deep learning 응용까지 통일된 수학 표기법으로 설명하여 로봇 커뮤니티에 큰 기여를 할 수 있으나, 실제 구현과 실험적 검증이 더욱 강화된다면 영향력이 더욱 증대될 것으로 판단된다.