Essence
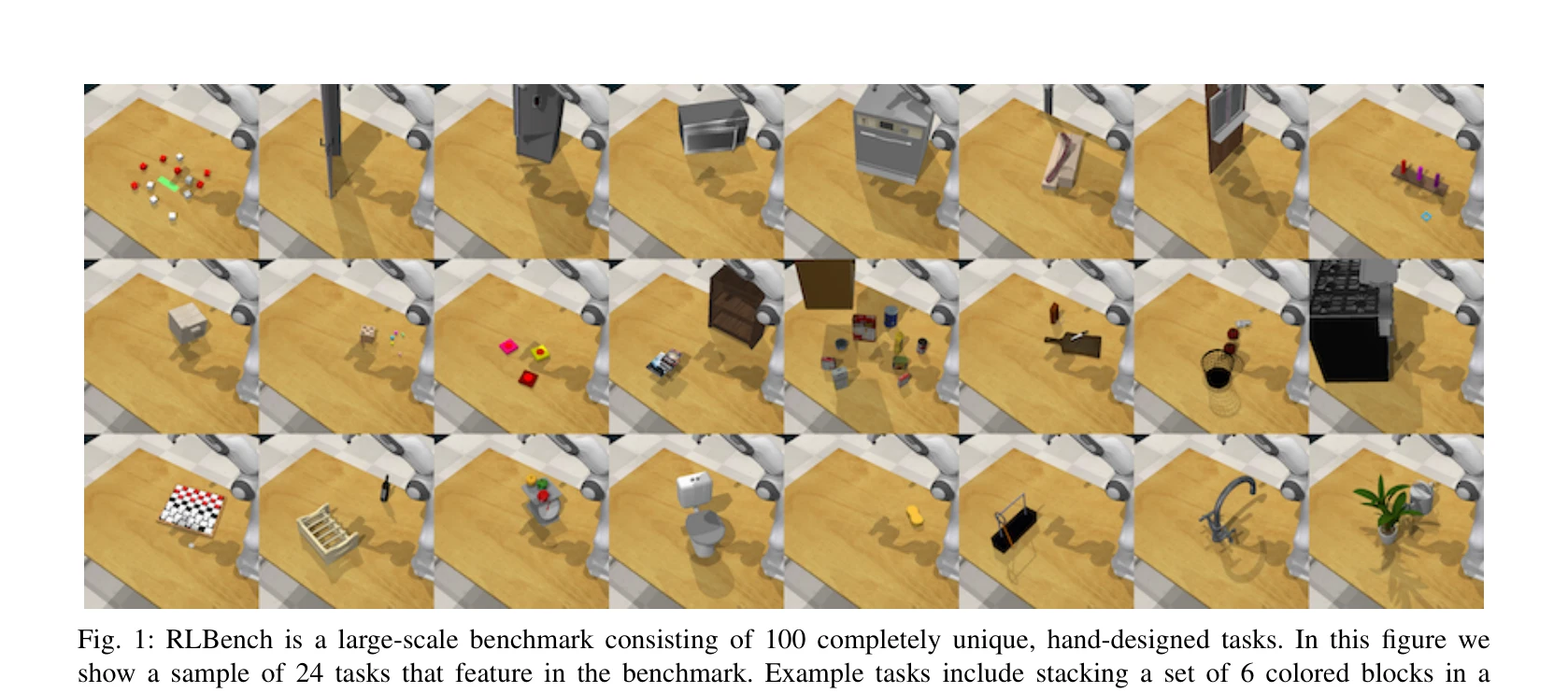
Fig. 1: RLBench is a large-scale benchmark consisting of 100 completely unique, hand-designed tasks. In this figure we
로봇 학습을 위한 대규모 벤치마크인 RLBench를 제시하며, 100개의 고유한 손-설계 태스크, 다양한 센서 모달리티, 그리고 motion planner를 통한 무한한 데모를 제공한다.
저자: Stephen James, Zicong Ma, David Rovick Arrojo, Andrew J. Davison | 날짜: 2019-09-26 | URL: https://arxiv.org/abs/1909.12271 📄 PDF
Fig. 1: RLBench is a large-scale benchmark consisting of 100 completely unique, hand-designed tasks. In this figure we
로봇 학습을 위한 대규모 벤치마크인 RLBench를 제시하며, 100개의 고유한 손-설계 태스크, 다양한 센서 모달리티, 그리고 motion planner를 통한 무한한 데모를 제공한다.
Fig. 1: RLBench is a large-scale benchmark consisting of 100 completely unique, hand-designed tasks. In this figure we
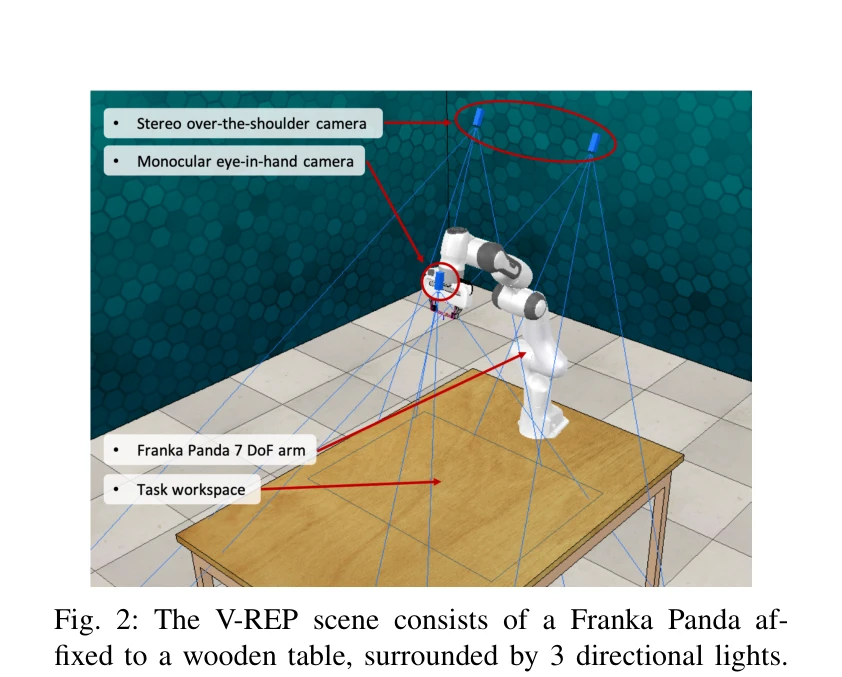
Fig. 2: The V-REP scene consists of a Franka Panda af-
총평: RLBench는 로봇 학습 커뮤니티를 위한 포괄적이고 확장 가능한 벤치마크로서 다양한 학습 패러다임을 통합적으로 평가할 수 있는 중요한 인프라를 제공한다. 시뮬레이션 기반이라는 제약이 있지만 무한 데모, scalable task creation, 100개 다양한 태스크의 조합으로 로봇 학습 연구의 표준화를 이루고 진전을 가속화할 수 있는 매우 가치 있는 기여이다.