Essence
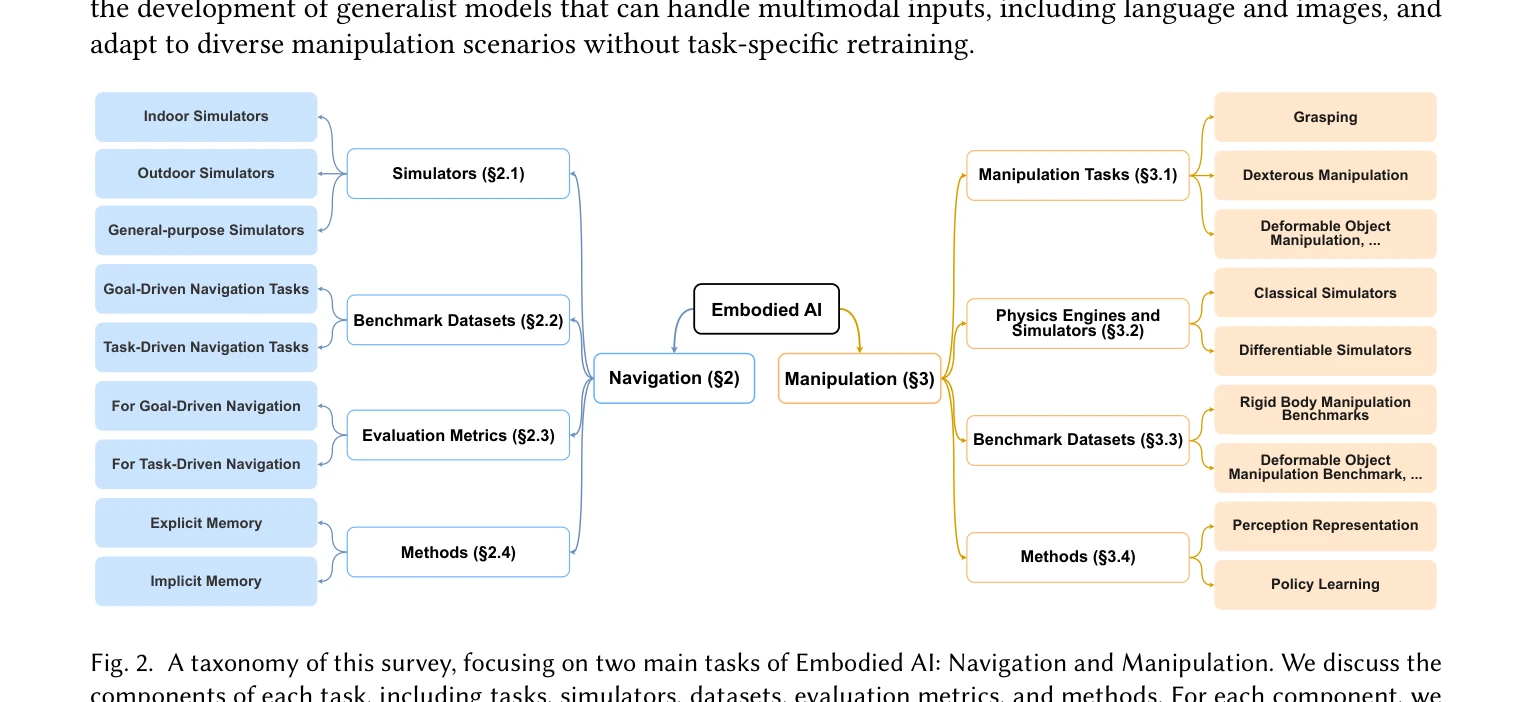
Fig. 2. A taxonomy of this survey, focusing on two main tasks of Embodied AI: Navigation and Manipulation. We discuss th
본 논문은 Embodied AI 시대에 로봇의 네비게이션과 조작 작업을 위한 Physics Simulator의 역할을 종합적으로 분석하고, sim-to-real 전이의 간극을 좁히기 위한 시뮬레이터 속성, 벤치마크, 평가 지표 및 최신 방법론을 제시한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 Embodied AI 시대의 navigation과 manipulation 연구를 포괄적으로 정리한 시의적절한 설문조사로, 현대적 simulator 기술과 최신 방법론(world model, geometric equivariance, VLA)을 체계적으로 분석하여 연구자들의 도구 선택과 방법론 설계에 실질적 가이드를 제공한다.