Essence
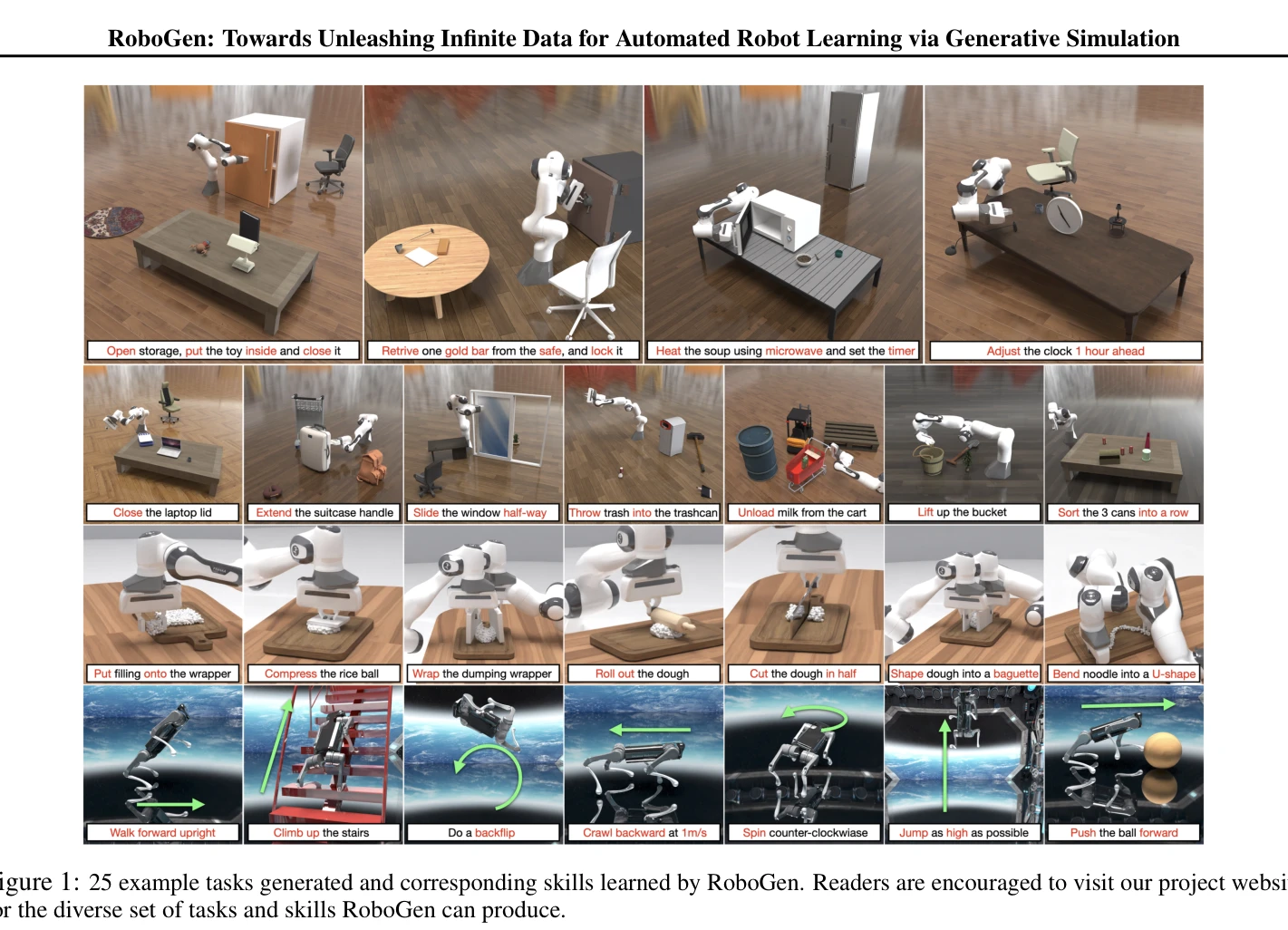
Figure 1: 25 example tasks generated and corresponding skills learned by RoboGen. Readers are encouraged to visit our pr
RoboGen은 생성형 모델을 활용하여 로봇이 자동으로 다양한 작업, 장면, 학습 감독을 생성하고 이를 통해 규모 있는 로봇 기술 학습을 가능하게 하는 자동화 파이프라인이다.
저자: Yufei Wang, Zhou Xian, Feng Chen, Tsun-Hsuan Wang, Yian Wang, Katerina Fragkiadaki, Zackory Erickson, David Held, Chuang Gan | 날짜: 2023-11-02 | URL: https://arxiv.org/abs/2311.01455 📄 PDF
Figure 1: 25 example tasks generated and corresponding skills learned by RoboGen. Readers are encouraged to visit our pr
RoboGen은 생성형 모델을 활용하여 로봇이 자동으로 다양한 작업, 장면, 학습 감독을 생성하고 이를 통해 규모 있는 로봇 기술 학습을 가능하게 하는 자동화 파이프라인이다.
Figure 1: 25 example tasks generated and corresponding skills learned by RoboGen. Readers are encouraged to visit our pr
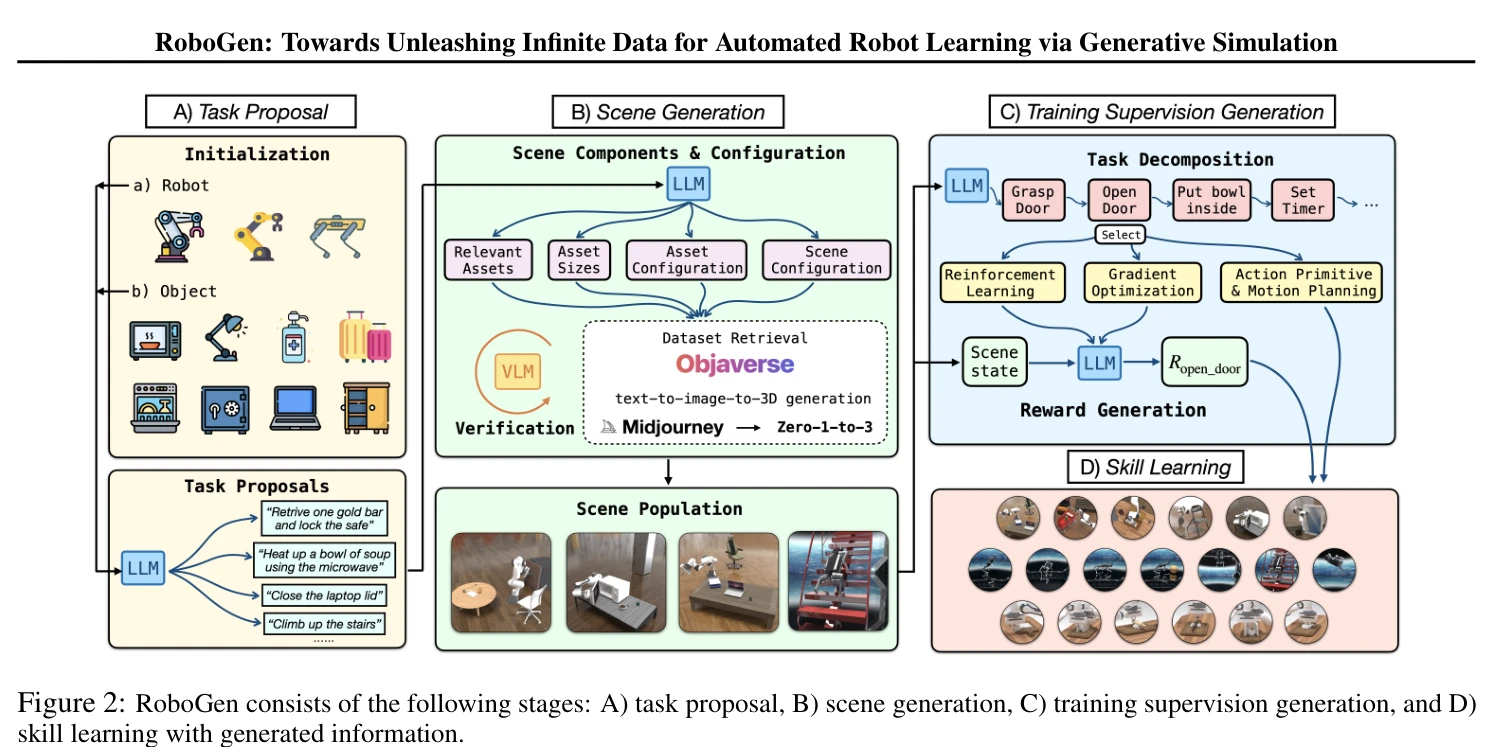
Figure 2: RoboGen consists of the following stages: A) task proposal, B) scene generation, C) training supervision gener
총평: RoboGen은 foundation 모델의 한계를 인식하면서도 그 강점을 창의적으로 활용하여 로봇 스킬 학습의 자동화와 규모 확대라는 의미 있는 문제를 해결한 논문이다. 완전 자동화된 파이프라인과 다양한 작업 생성이라는 성과는 주목할 만하나, 현실 환경으로의 적용 검증이 필요하다.