Essence
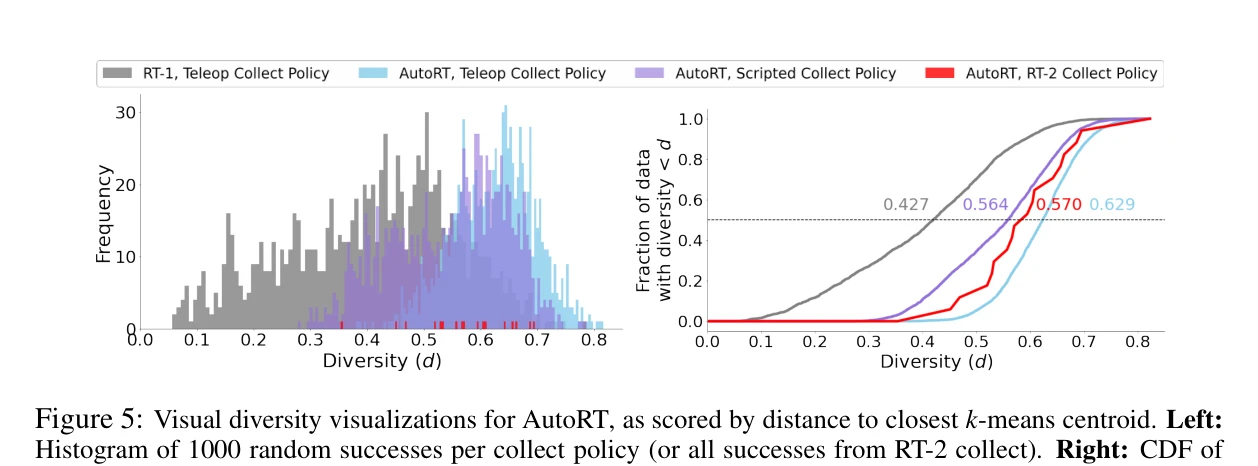
Fig. 5 shows the visual diversity across each of AutoRT’s data collection policies, along with the
AutoRT는 VLM과 LLM을 활용하여 로봇 함대의 대규모 자율 데이터 수집을 오케스트레이션하는 시스템으로, 77,000개의 실제 로봇 에피소드를 다양한 미지의 환경에서 수집했다.
저자: Michael Ahn, Debidatta Dwibedi, Chelsea Finn, Montse Gonzalez Arenas, Keerthana Gopalakrishnan, Karol Hausman, Brian Ichter, Alex Irpan, Nikhil Joshi, Ryan Julian, Sean Kirmani, Isabel Leal, Edward Lee, Sergey Levine, Yao Lu, Isabel Leal, Sharath Maddineni, Kanishka Rao, Dorsa Sadigh, Pannag Sanketi, Pierre Sermanet, Quan Vuong, Stefan Welker, Fei Xia, Ted Xiao, Peng Xu, Steve Xu, Zhuo Xu | 날짜: 2024-01-23 | URL: https://arxiv.org/abs/2401.12963 📄 PDF
Fig. 5 shows the visual diversity across each of AutoRT’s data collection policies, along with the
AutoRT는 VLM과 LLM을 활용하여 로봇 함대의 대규모 자율 데이터 수집을 오케스트레이션하는 시스템으로, 77,000개의 실제 로봇 에피소드를 다양한 미지의 환경에서 수집했다.
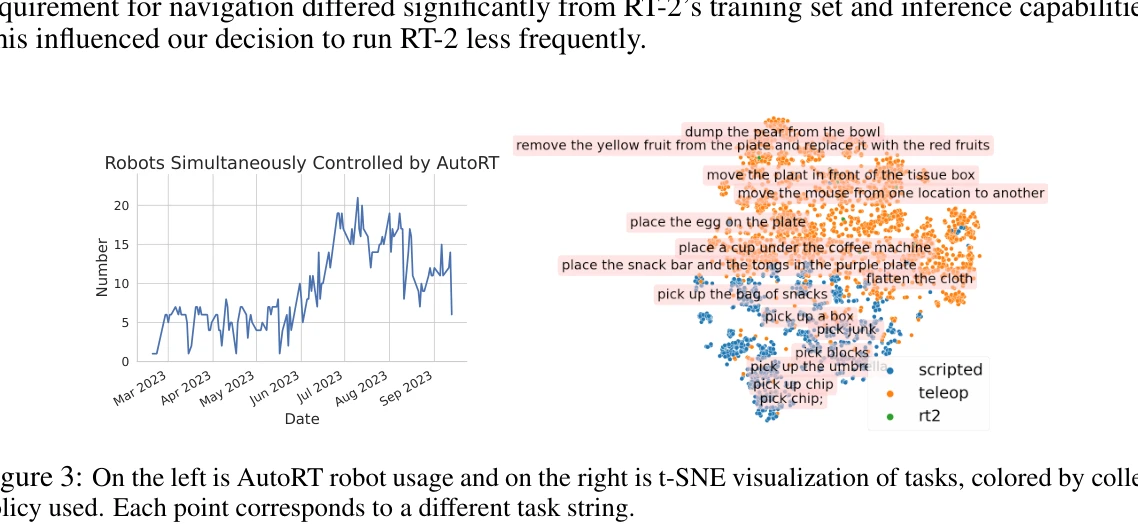
Figure 3: On the left is AutoRT robot usage and on the right is t-SNE visualization of tasks, colored by collect
Fig. 5 shows the visual diversity across each of AutoRT’s data collection policies, along with the
총평: AutoRT는 foundation model을 활용한 대규모 로봇 함대 오케스트레이션의 최초 실증 사례로서, 실제 환경에서의 자율성과 안전성의 균형을 이룬 혁신적 시스템이다. 77,000 에피소드의 실제 데이터 수집 및 효율적 인력 활용 달성은 embodied AI의 스케일링에 중대한 기여를 제시한다.