저자: Qiang Zhang, Jiahao Ma, Peiran Liu, Shuai Shi, Zeran Su, Zifan Wang, Jingkai Sun, Wei Cui, Jialin Yu, Gang Han, Wen Zhao, Pihai Sun, Kangning Yin, Jiaxu Wang, Jiahang Cao, Lingfeng Zhang, Hao Cheng, Xiaoshuai Hao, Yiding Ji, Junwei Liang, Jian Tang, Renjing Xu, Yijie Guo | 날짜: 2026-02-17 | DOI: 10.48550/arXiv.2602.15733 📄 PDF
Essence
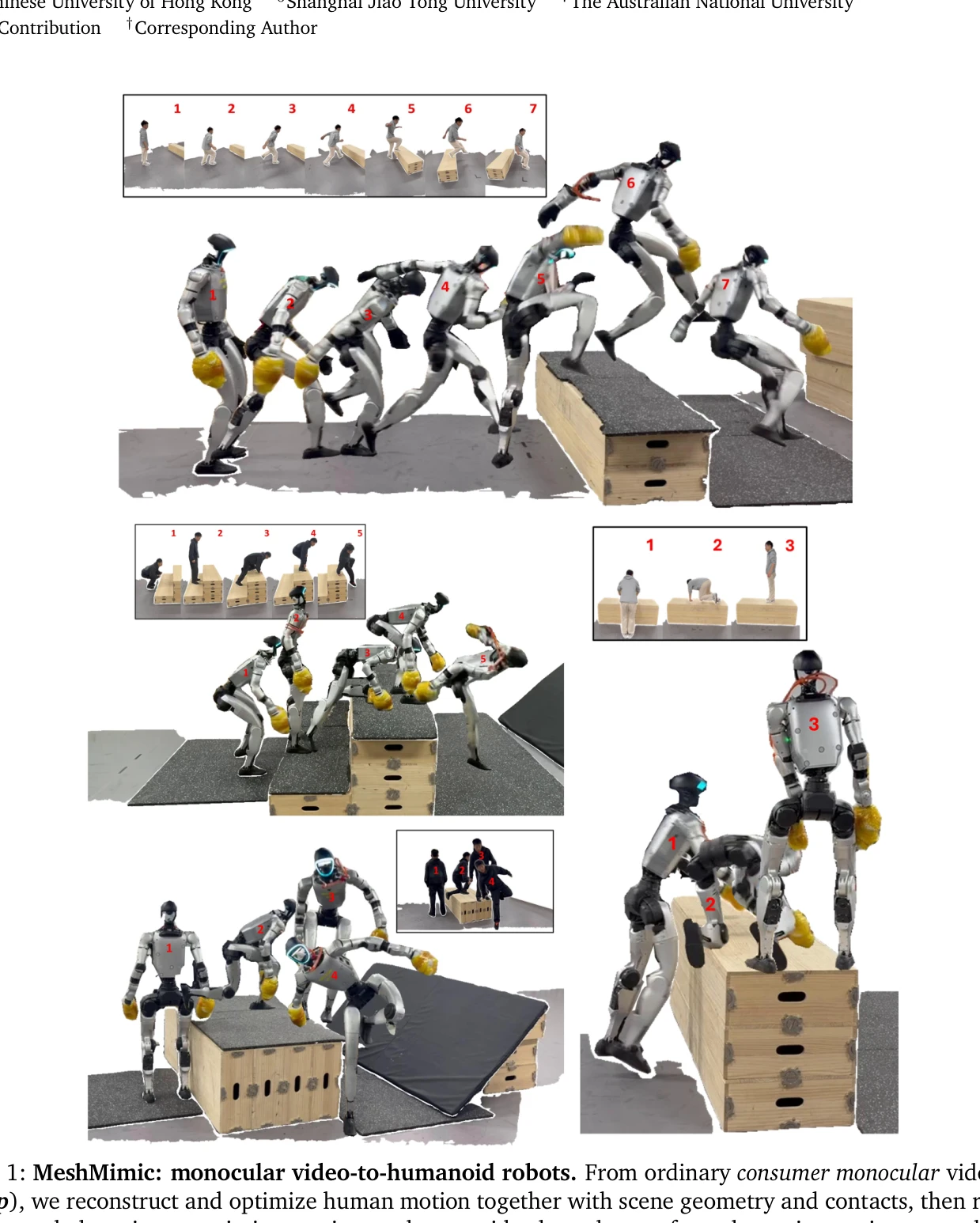
Figure 1: MeshMimic: monocular video-to-humanoid robots. From ordinary consumer monocular videos (no
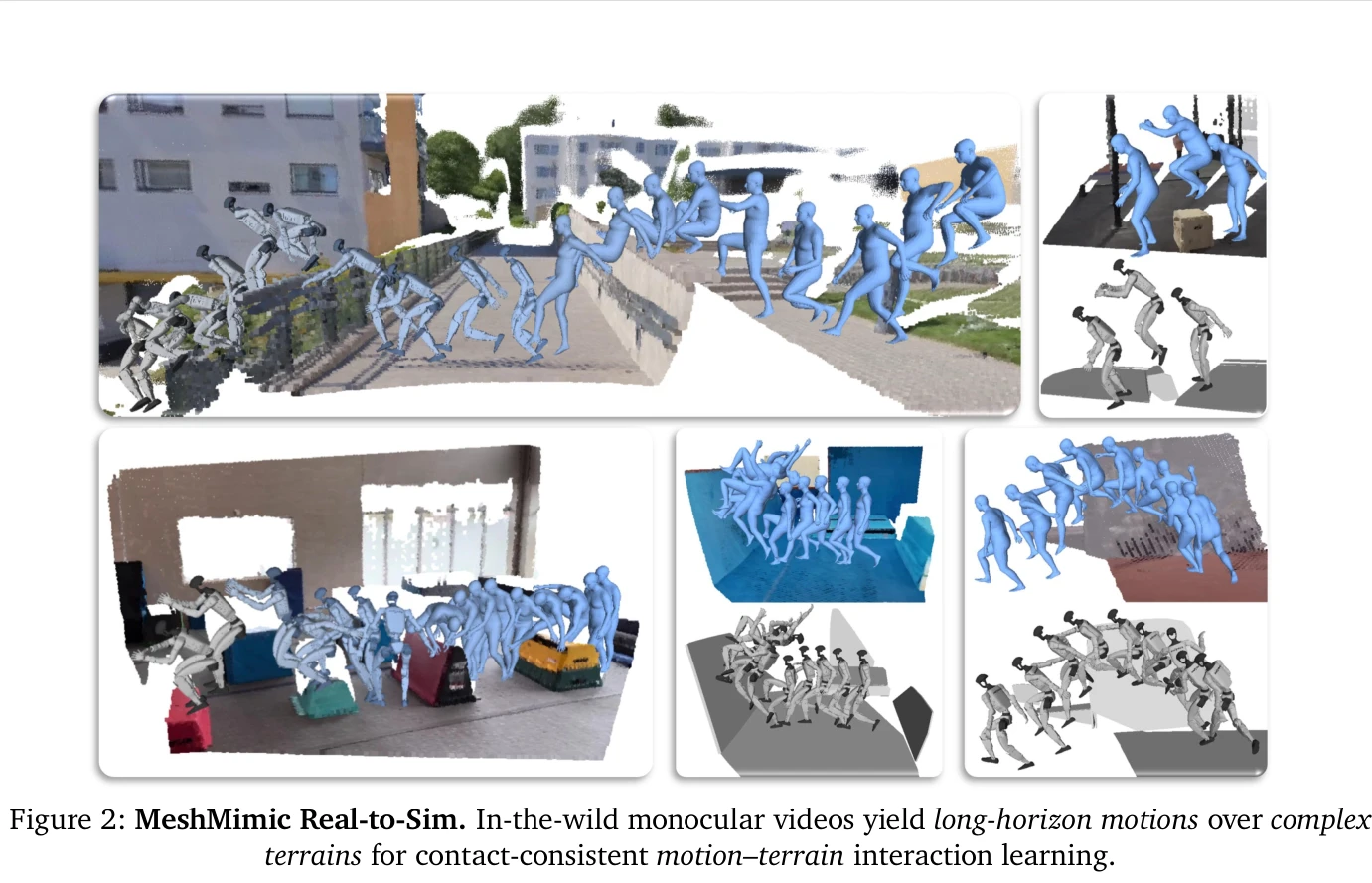
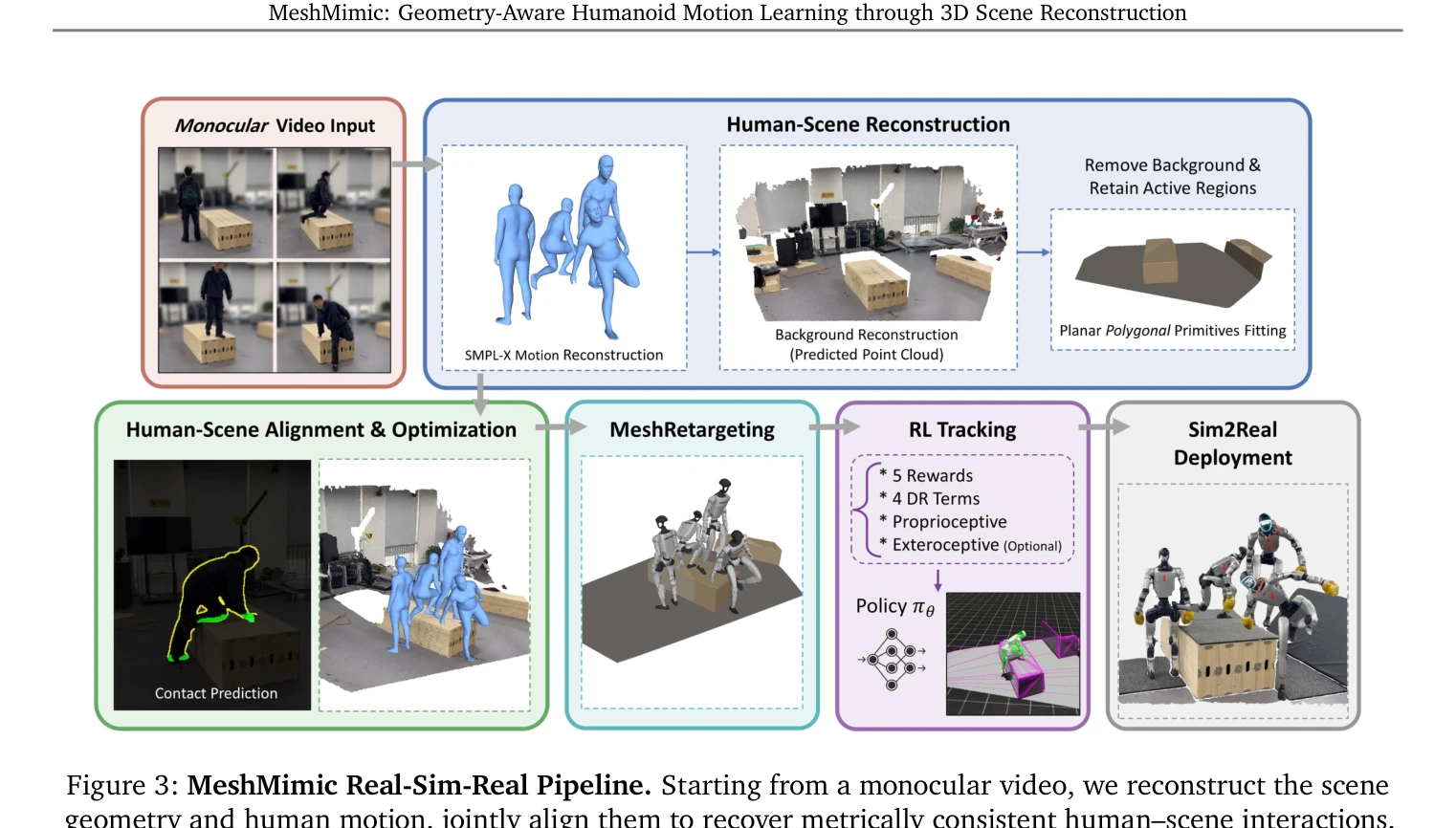
MeshMimic은 단일 모노큘러 비디오에서 3D 장면 재구성을 통해 휴머노이드 로봇이 복잡한 지형과의 상호작용을 학습할 수 있는 프레임워크이다. Kinematic Consistency Optimization과 contact-aware retargeting을 통해 모션-지형 결합 상호작용을 정확하게 전달한다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: MeshMimic은 3D 비전과 구체화된 지능을 창의적으로 결합하여 비용 효율적이고 확장 가능한 휴머노이드 로봇 훈련 방식을 제시한다. 물리적 일관성 최적화와 접촉 인식 retargeting을 통해 복잡한 지형에서의 안정적인 상호작용을 실현함으로써 로봇 제어 분야에 상당한 기여를 한다.