저자: Kangning Yin, Zhe Cao, Wentao Dong, Weishuai Zeng, Tianyi Zhang, Qiang Zhang, Jingbo Wang, Jiangmiao Pang, Ming Zhou, Weinan Zhang | 날짜: 2026-01-30 | DOI: 10.48550/arXiv.2601.22517 📄 PDF
Essence
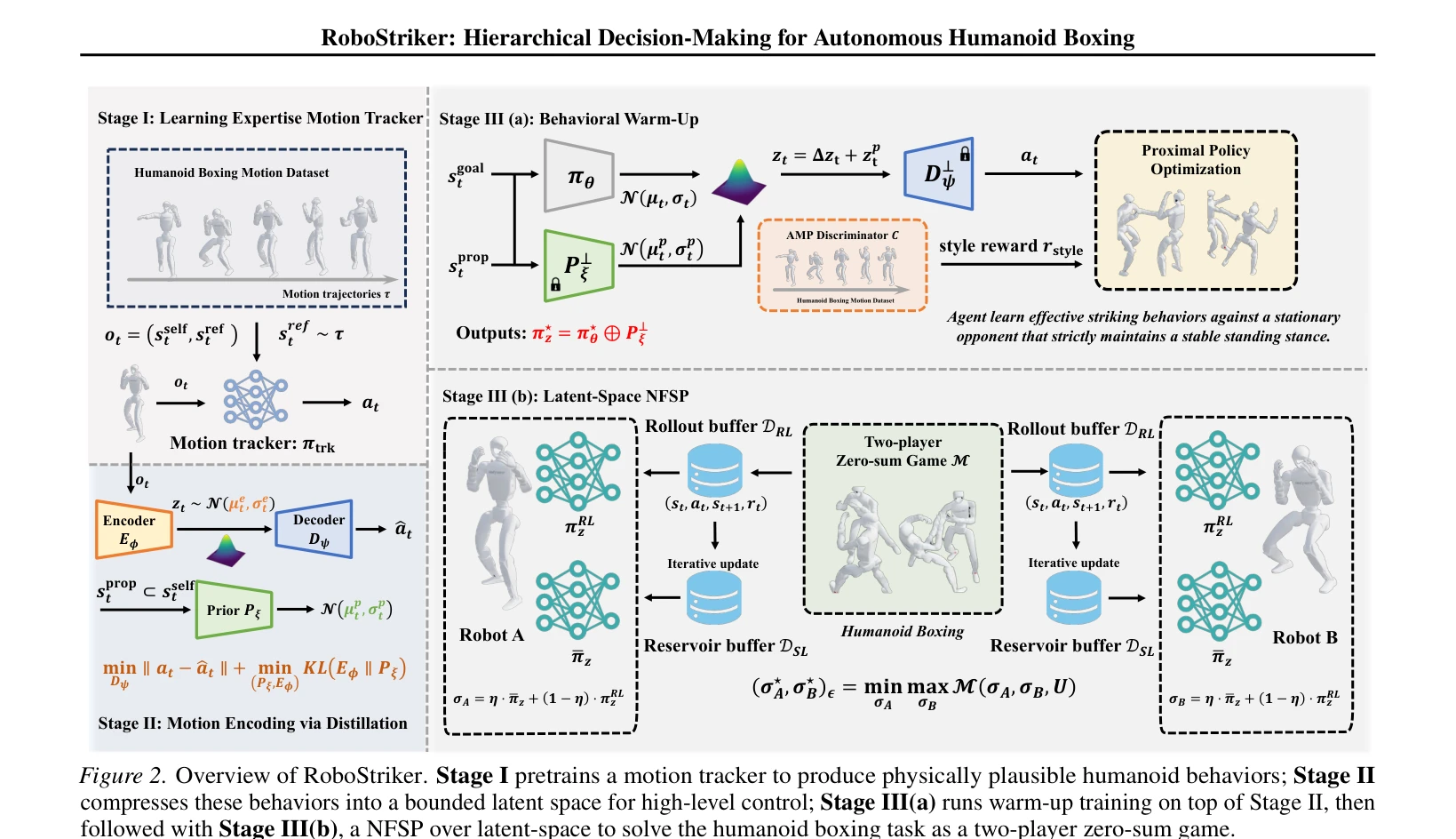
Figure 2. Overview of RoboStriker. Stage I pretrains a motion tracker to produce physically plausible humanoid behaviors
RoboStriker는 인간 수준의 경쟁력 있는 휴머노이드 권투를 위해 높은 수준의 전략 추론과 낮은 수준의 물리적 실행을 분리하는 3단계 계층적 프레임워크를 제안한다. Motion capture 데이터로부터 학습된 동작 라이브러리를 구조화된 잠재 공간으로 압축한 후, Latent-Space NFSP를 통해 다중 에이전트 경쟁 학습을 수행한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: RoboStriker는 embodied MARL의 근본적 모순을 처음으로 공식화하고 계층적 분해를 통해 실질적으로 해결하는 주요 기여를 제시한다. 물리 시뮬레이션과 실제 로봇에서 권투라는 도전적 작업을 성공적으로 달성하여, 추상 게임에서 물리 기반 로봇 시스템으로 MARL을 확장하는 중요한 마일스톤을 제공한다.