Essence
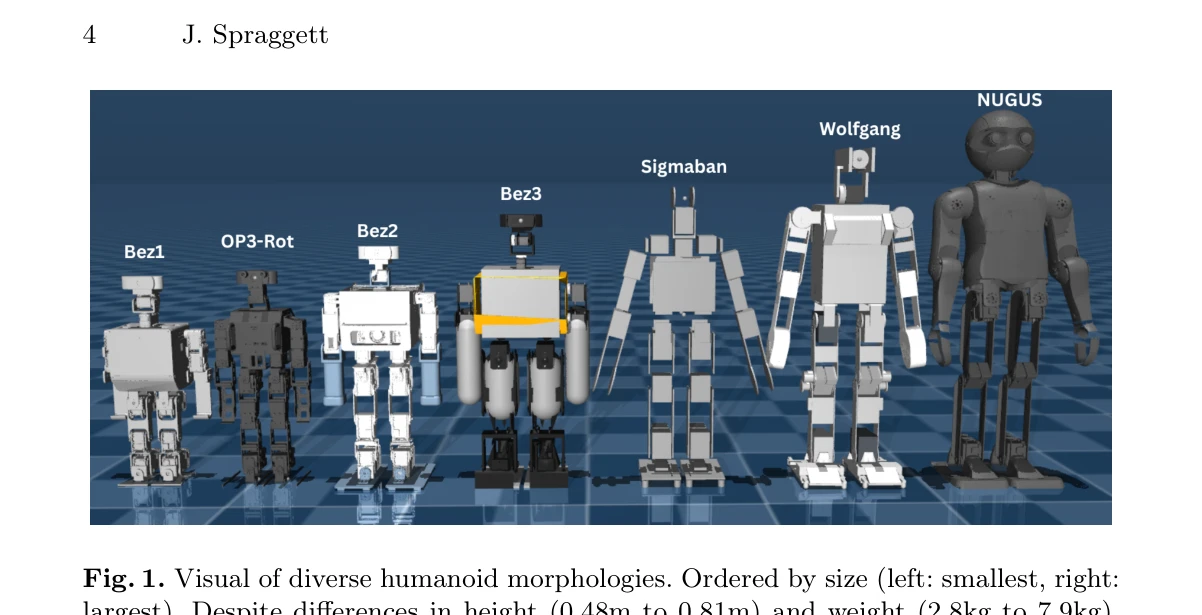
Fig. 1. Visual of diverse humanoid morphologies. Ordered by size (left: smallest, right:
7개의 다양한 휴머노이드 로봇(높이 0.48-0.81m, 무게 2.8-7.9kg)에서 낙상 복구를 수행할 수 있는 단일 통합 DRL 정책을 제시하며, 로봇 특화 학습 없이 미학습 로봇에 86±7% 성공률로 제로샷 전이가 가능함을 보였다.
저자: Jonathan Spraggett | 날짜: 2025-12-13 | URL: https://arxiv.org/abs/2512.12230 📄 PDF
Fig. 1. Visual of diverse humanoid morphologies. Ordered by size (left: smallest, right:
7개의 다양한 휴머노이드 로봇(높이 0.48-0.81m, 무게 2.8-7.9kg)에서 낙상 복구를 수행할 수 있는 단일 통합 DRL 정책을 제시하며, 로봇 특화 학습 없이 미학습 로봇에 86±7% 성공률로 제로샷 전이가 가능함을 보였다.
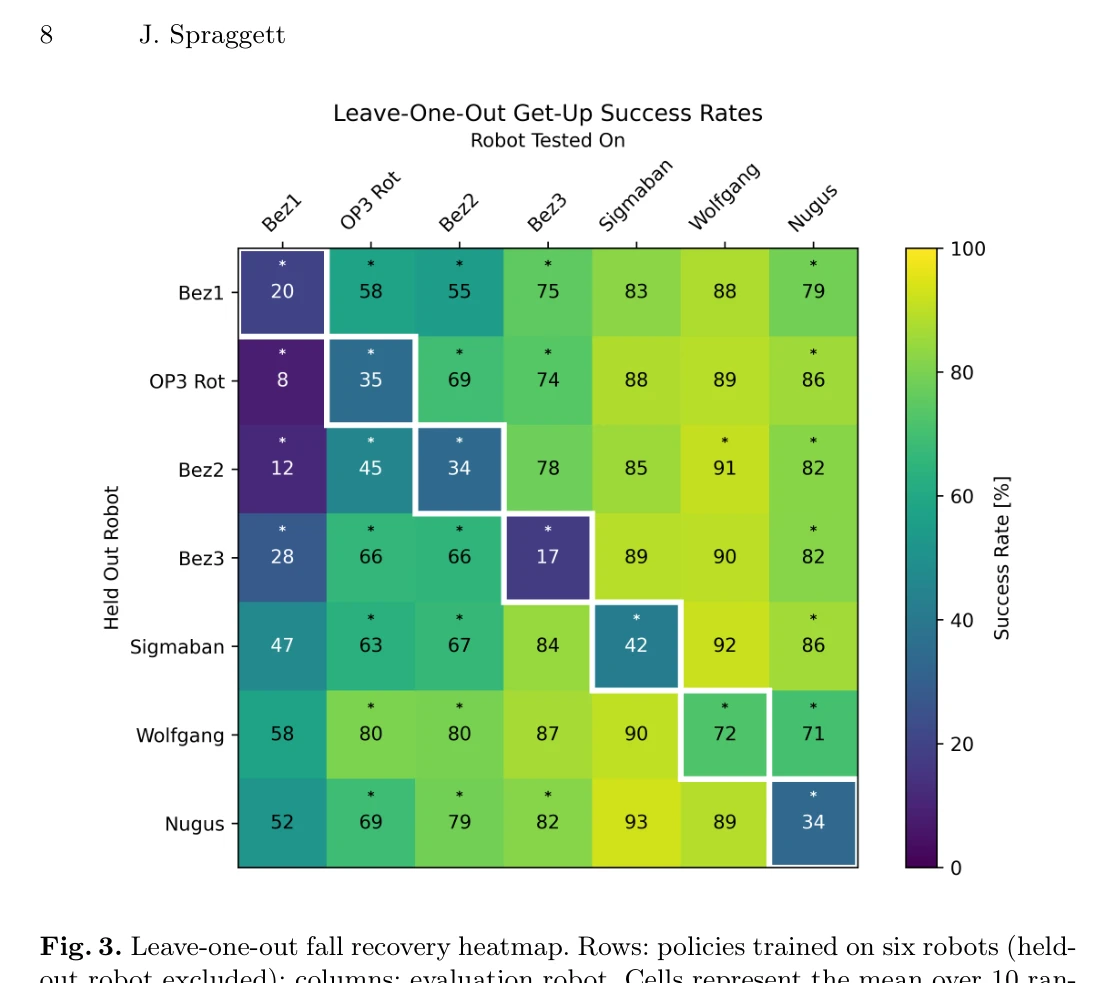
Fig. 3. Leave-one-out fall recovery heatmap. Rows: policies trained on six robots (held-
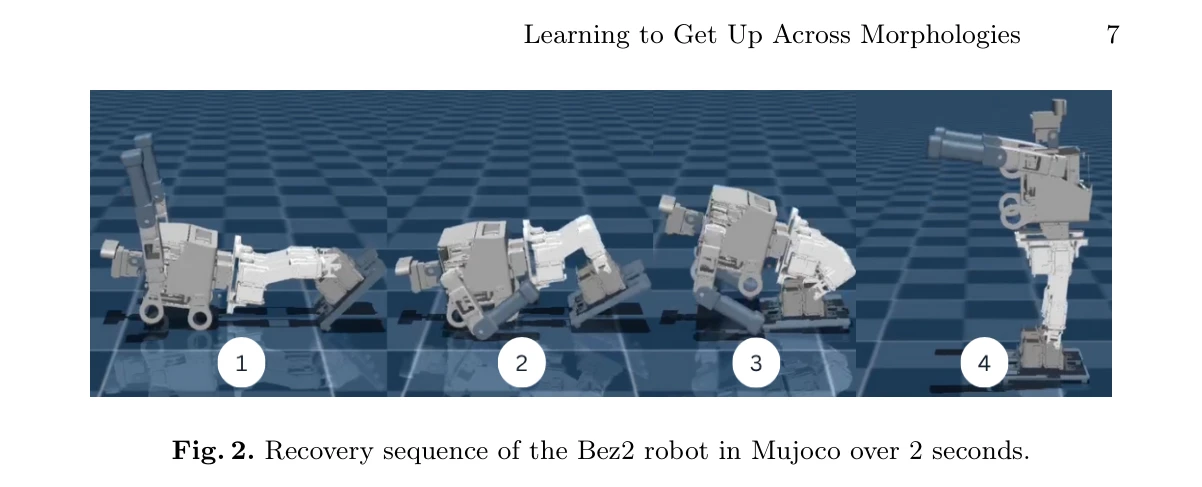
Fig. 2. Recovery sequence of the Bez2 robot in Mujoco over 2 seconds.
총평: 이 논문은 휴머노이드 낙상 복구라는 구체적 과제에서 형태-불가지론적 다중 로봇 제어의 실현 가능성을 처음 입증하며, 포괄적 실험과 높은 제로샷 성능으로 일반화된 로봇 제어의 기초를 마련한다. 다만 시뮬레이션 기반 검증과 실제 전이 실험이 부재한 점이 한계이지만, 오픈소스 공개와 체계적 분석은 해당 분야에 실질적 기여를 한다.