저자: Zifan Wang, Teli Ma, Yufei Jia, Xun Yang, Jiaming Zhou, Wenlong Ouyang, Qiang Zhang, Junwei Liang | 날짜: 2025-05-25 | URL: https://arxiv.org/abs/2505.19214 📄 PDF
Essence
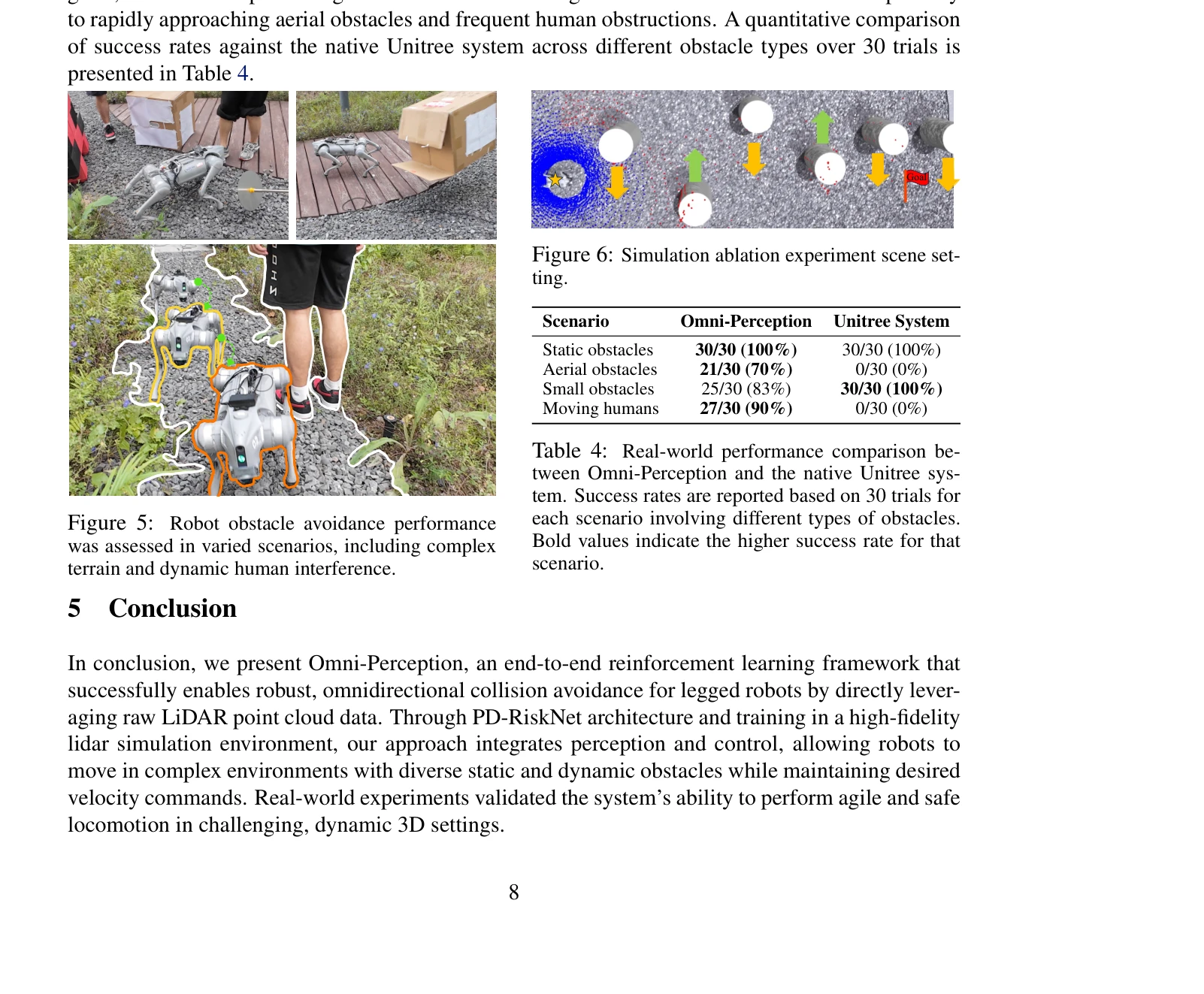
Figure 1: Validation scenarios for the Omni-Perception framework. Effective omnidirectional collision avoid-
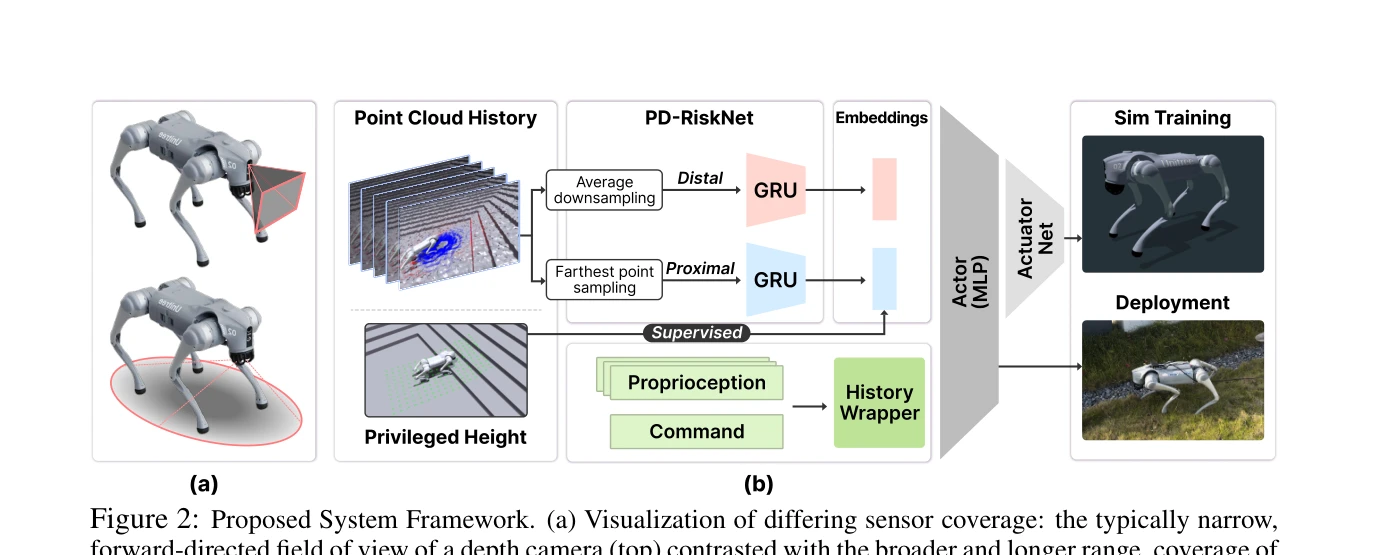
본 논문은 LiDAR 포인트 클라우드를 직접 처리하는 end-to-end 강화학습 정책 Omni-Perception을 제안하여 동적 환경에서 다리 로봇의 전방향 충돌 회피를 실현한다. PD-RiskNet이라는 새로운 지각 모듈을 통해 시공간적 LiDAR 데이터를 해석하여 환경 위험을 평가한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 다리 로봇의 동적 환경 네비게이션에 LiDAR을 직접 활용한 end-to-end 학습 프레임워크라는 참신한 접근을 제시하며, 실용적인 시뮬레이션 툴킷과 함께 강건한 sim-to-real 전이를 입증한다. 다만 기술 상세 공개 수준과 극단 환경 검증 보강이 필요하다.