Essence
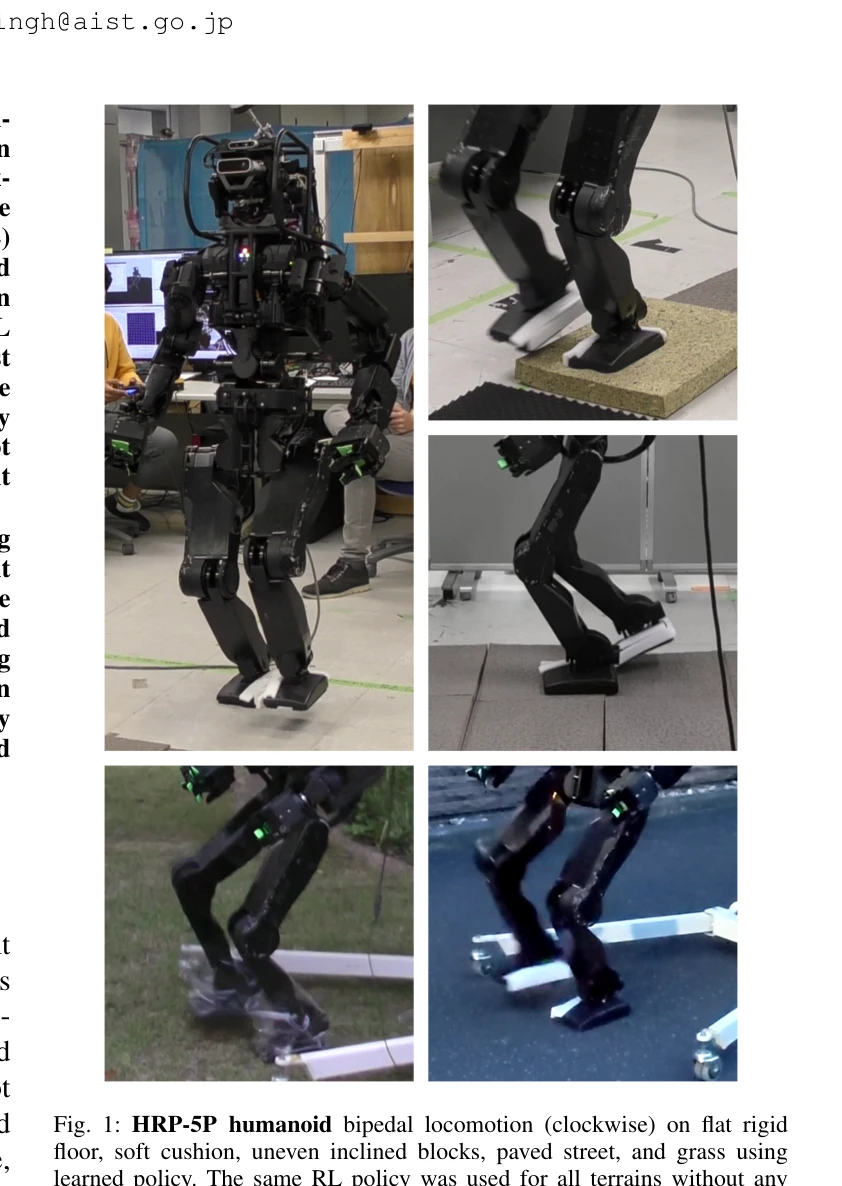
Fig. 1: HRP-5P humanoid bipedal locomotion (clockwise) on flat rigid
Deep RL을 이용하여 humanoid robot HRP-5P가 시뮬레이션에서 terrain randomization으로 학습한 정책을 실제 환경의 compliant하고 uneven한 terrain에서도 robust하게 보행하도록 하는 연구이다.
저자: Rohan P. Singh, Mitsuharu Morisawa, Mehdi Benallegue, Zhaoming Xie, Fumio Kanehiro | 날짜: 2025-04-18 | URL: https://arxiv.org/abs/2504.13619 📄 PDF
Fig. 1: HRP-5P humanoid bipedal locomotion (clockwise) on flat rigid
Deep RL을 이용하여 humanoid robot HRP-5P가 시뮬레이션에서 terrain randomization으로 학습한 정책을 실제 환경의 compliant하고 uneven한 terrain에서도 robust하게 보행하도록 하는 연구이다.
Fig. 1: HRP-5P humanoid bipedal locomotion (clockwise) on flat rigid
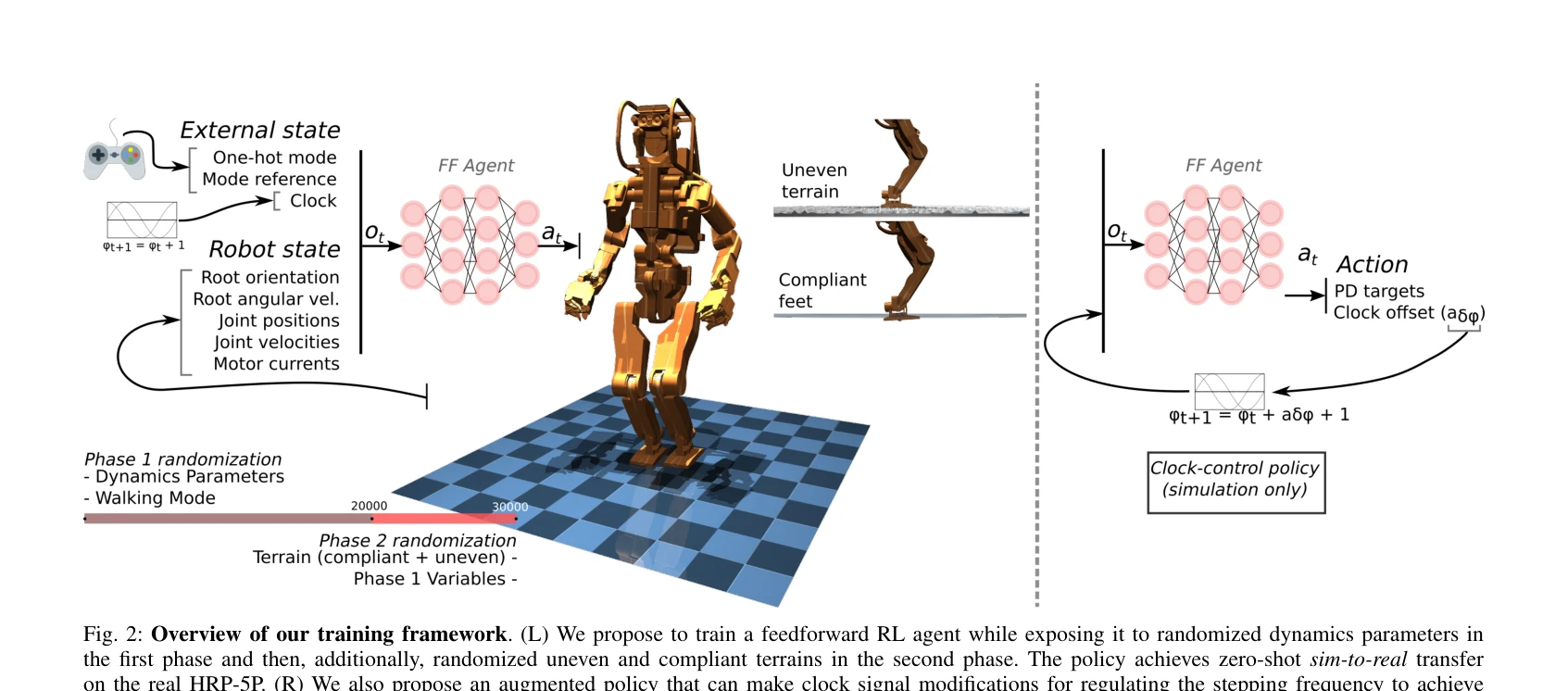
Fig. 2: Overview of our training framework. (L) We propose to train a feedforward RL agent while exposing it to randomiz
총평: Life-sized humanoid의 challenging terrain 보행을 위한 deep RL 기반 접근법의 실제 구현을 성공적으로 입증했으며, sim-to-real transfer와 adaptive gait control의 효과를 명확히 보여준 의미 있는 연구이다. 다만 clock control 정책의 실제 적용 효과 검증과 failure case 분석이 보강되면 더욱 완성도 높은 작업이 될 수 있다.