Essence
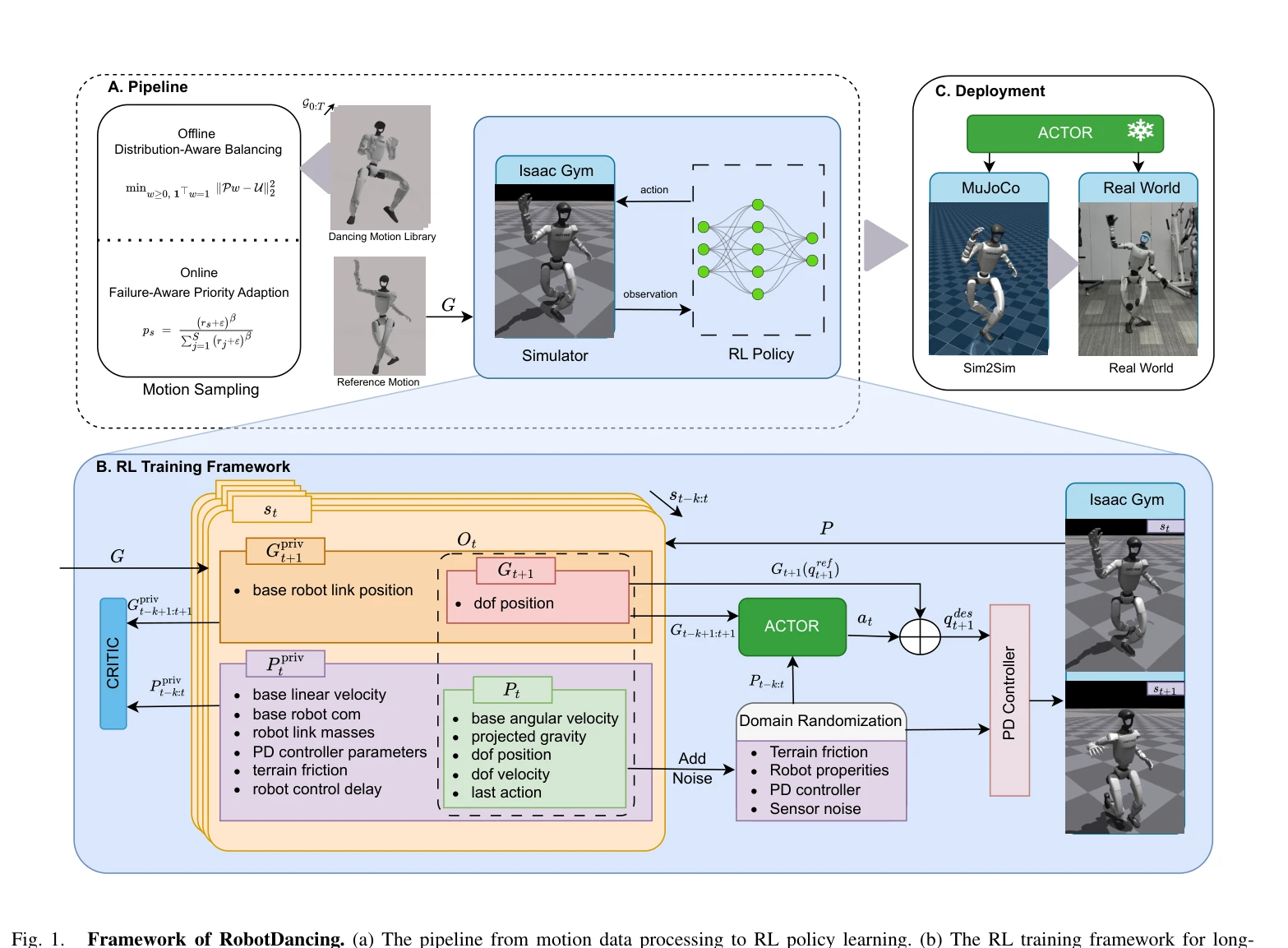
Fig. 1.
RobotDancing은 잔차 동작(residual action) 강화학습을 통해 인간형 로봇이 장기간 고역동 춤 동작을 추적할 수 있도록 하는 프레임워크로, 모델-실제 간의 동역학 불일치를 명시적으로 보정한다.
저자: Zhenguo Sun, Yibo Peng, Yuan Meng, Xukun Li, Bo-Sheng Huang, Zhenshan Bing, Xinlong Wang, Alois Knoll | 날짜: 2025-09-25 | URL: https://arxiv.org/abs/2509.20717 📄 PDF
Fig. 1.
RobotDancing은 잔차 동작(residual action) 강화학습을 통해 인간형 로봇이 장기간 고역동 춤 동작을 추적할 수 있도록 하는 프레임워크로, 모델-실제 간의 동역학 불일치를 명시적으로 보정한다.
Fig. 1.
Fig. 1.
총평: RobotDancing은 잔차 동작 학습과 이원 샘플링 전략을 통해 인간형 로봇의 장기 고역동 모션 추적 문제를 우아하게 해결하며, 실제 로봇으로의 영점 전달 성공은 실무적 가치가 높다.