Essence
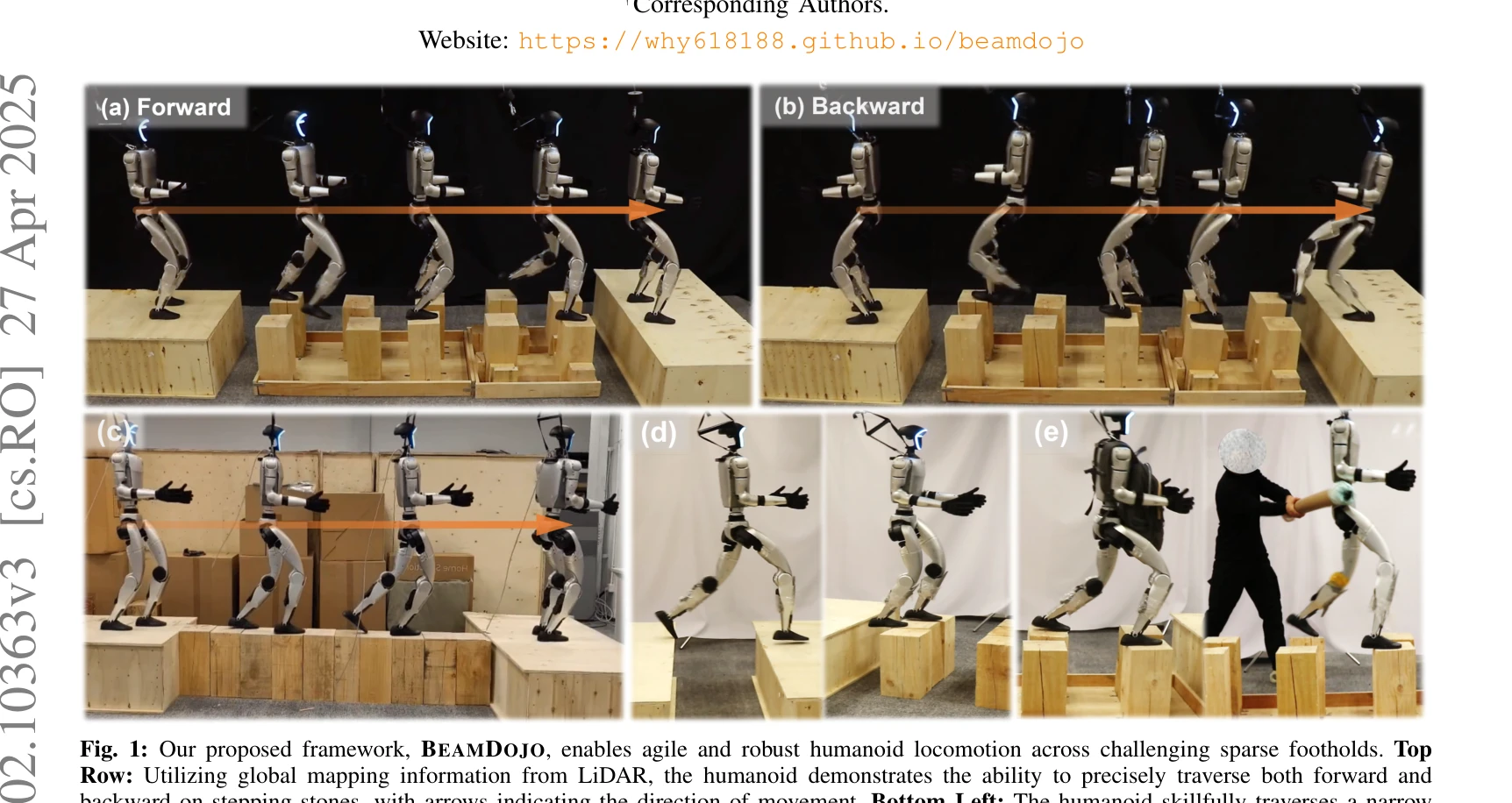
Fig. 1: Our proposed framework, BEAMDOJO, enables agile and robust humanoid locomotion across challenging sparse foothol
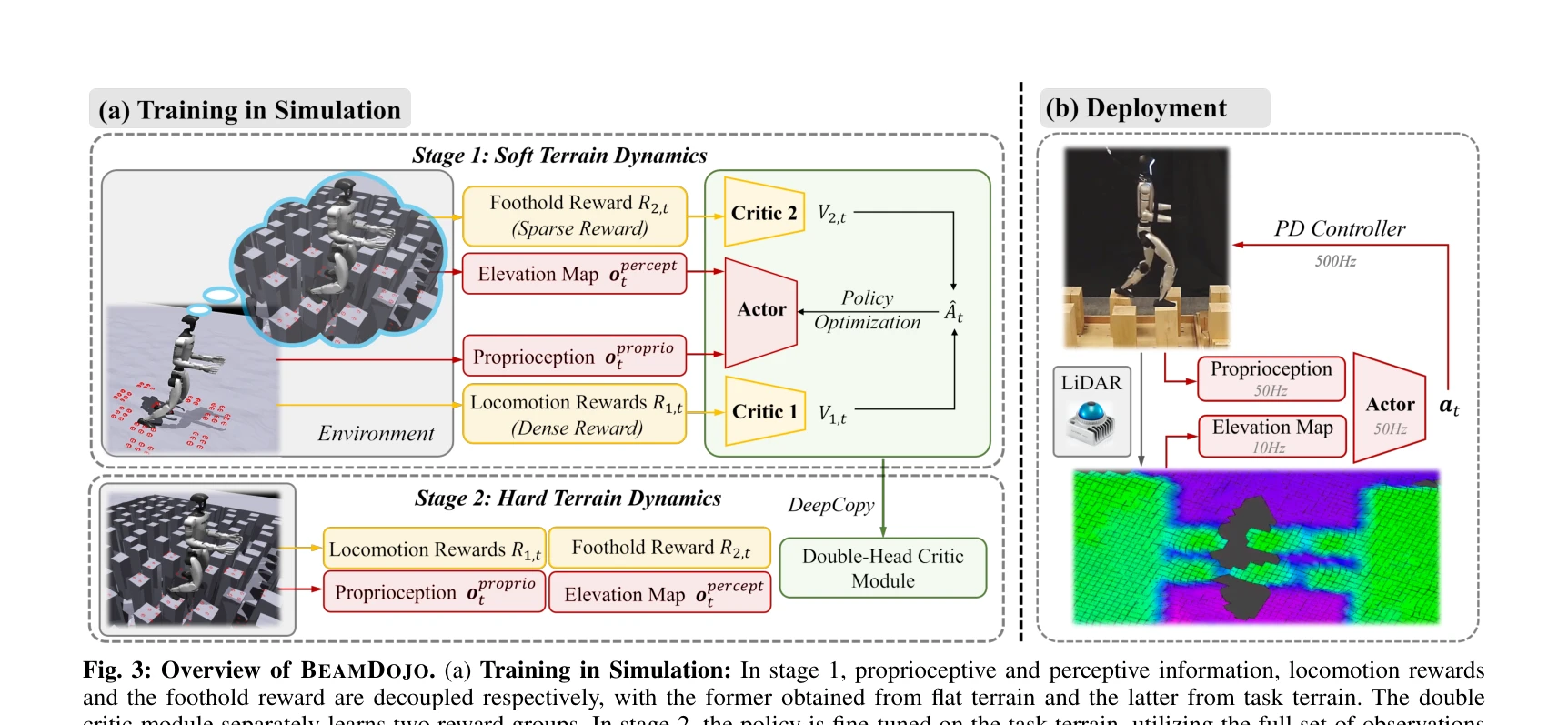
BeamDojo는 샘플링 기반의 다각형 발 보상 함수와 이중 critic 아키텍처를 결합한 2단계 강화학습 프레임워크로, 휴머노이드 로봇이 디딤돌과 같은 드문 디딤점을 가진 복잡한 지형에서 민첩하고 정밀한 보행을 학습하게 한다.