Essence
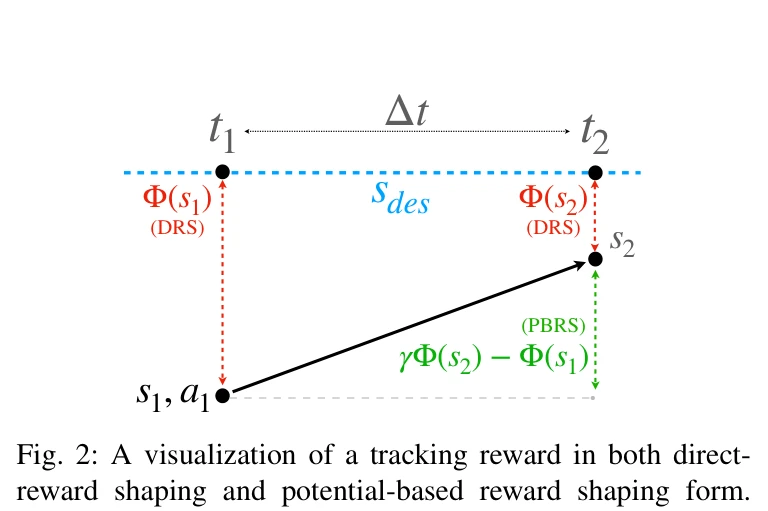
Fig. 2: A visualization of a tracking reward in both direct-
본 논문은 humanoid 로봇의 고차원 보행 학습에서 potential-based reward shaping (PBRS)과 direct reward shaping (DRS)을 벤치마크하여, PBRS가 수렴 속도에서는 한계적 이점만 제공하지만 보상 척도에 대해 훨씬 더 견고하다는 것을 실증적으로 입증한다.
저자: Se Hwan Jeon, Steve Heim, Charles Khazoom, Sangbae Kim | 날짜: 2023-07-19 | URL: https://arxiv.org/abs/2307.10142 📄 PDF
Fig. 2: A visualization of a tracking reward in both direct-
본 논문은 humanoid 로봇의 고차원 보행 학습에서 potential-based reward shaping (PBRS)과 direct reward shaping (DRS)을 벤치마크하여, PBRS가 수렴 속도에서는 한계적 이점만 제공하지만 보상 척도에 대해 훨씬 더 견고하다는 것을 실증적으로 입증한다.
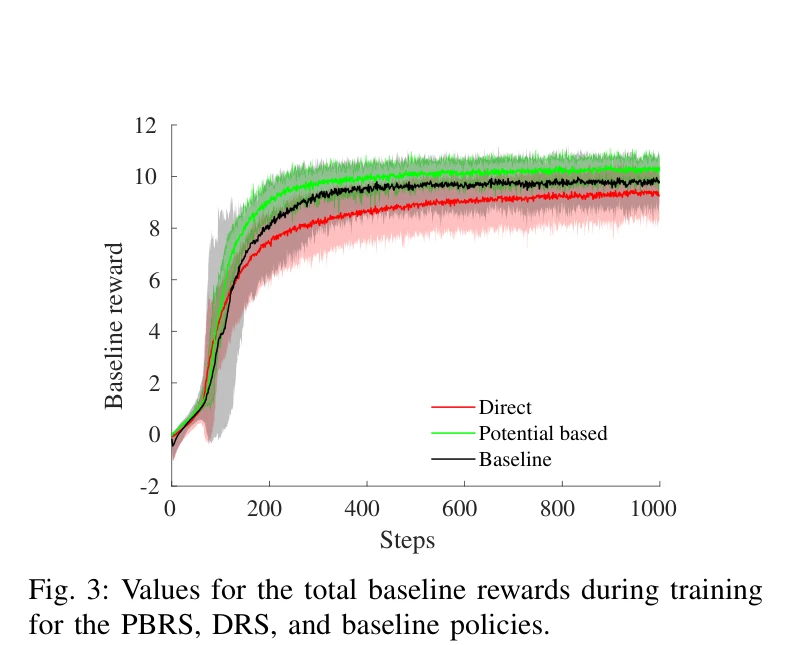
Fig. 3: Values for the total baseline rewards during training
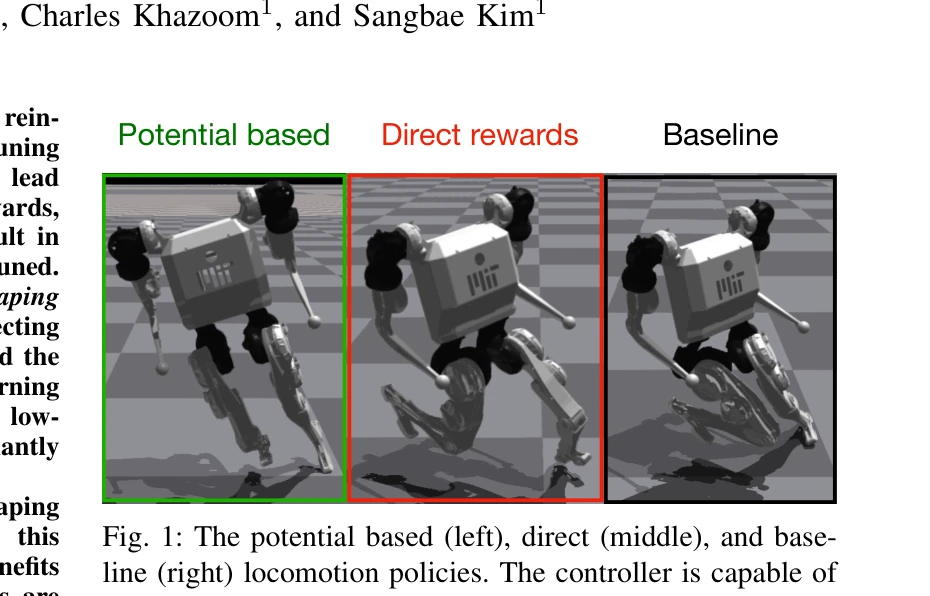
Fig. 1: The potential based (left), direct (middle), and base-
총평: 본 논문은 고차원 로보틱 시스템에서 PBRS의 실제 효과를 실증적으로 검증한 중요한 케이스 스터디로, 보상 함수 설계의 실무적 지침(특히 견고성 측면)을 제공한다. 다만 단일 태스크 벤치마크와 이론-실전 간 격차의 원인 분석이 보강된다면 더욱 강력한 기여가 될 것이다.