Essence
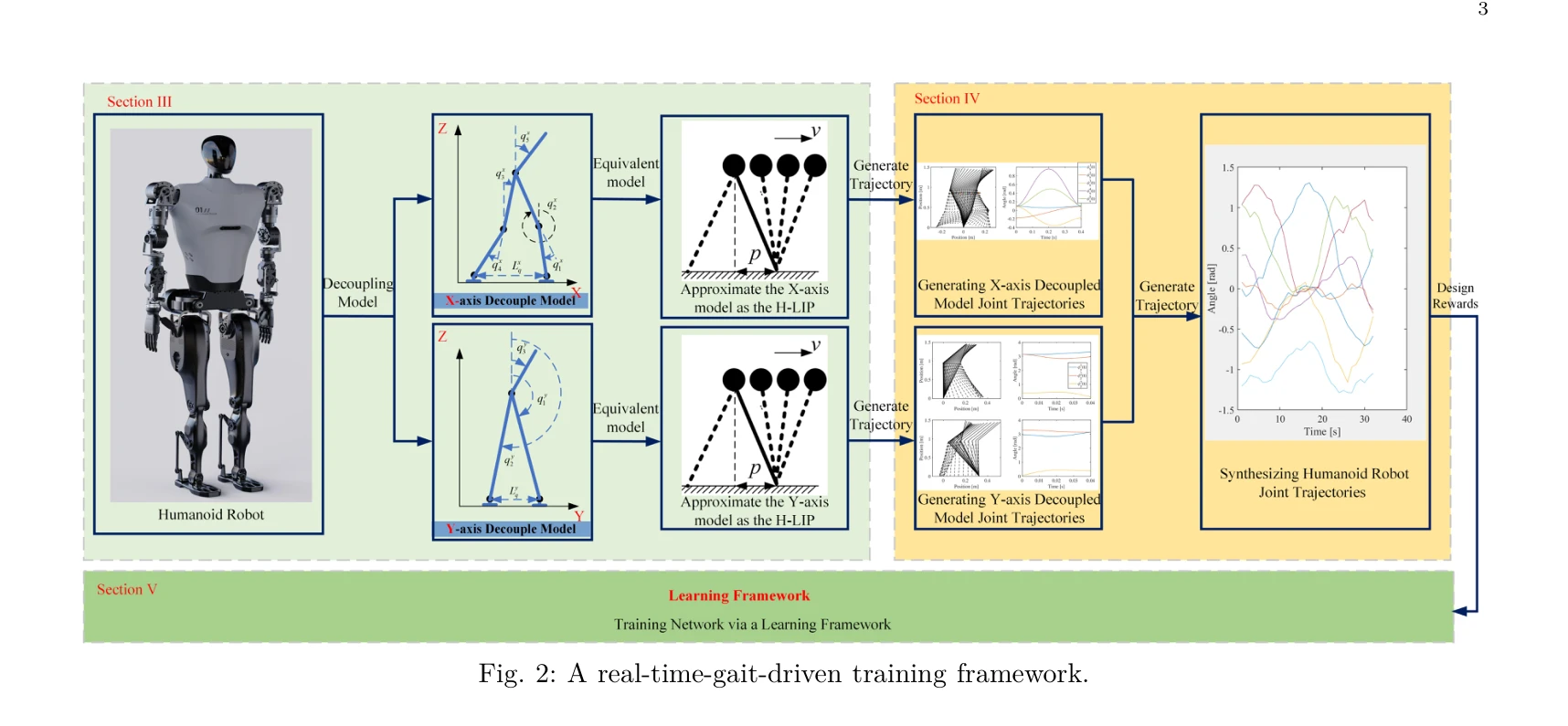
Fig. 2: A real-time-gait-driven training framework.
본 논문은 humanoid robot의 bipedal gait 학습을 위해 실시간 gait planner와 structured reward composition을 결합한 reinforcement learning framework를 제시한다.
저자: Bolin Li, Yuzhi Jiang, Linwei Sun, Xuecong Huang, Lijun Zhu, Han Ding | 날짜: 2025-06-10 | URL: https://arxiv.org/abs/2506.08416 📄 PDF
Fig. 2: A real-time-gait-driven training framework.
본 논문은 humanoid robot의 bipedal gait 학습을 위해 실시간 gait planner와 structured reward composition을 결합한 reinforcement learning framework를 제시한다.
Fig. 2: A real-time-gait-driven training framework.
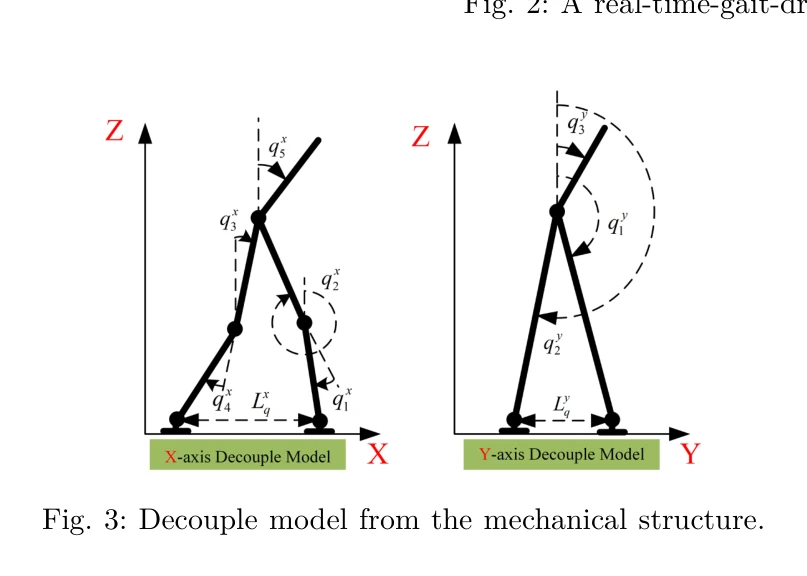
Fig. 3: Decouple model from the mechanical structure.
총평: 본 논문은 model-based planning과 data-driven learning을 효과적으로 결합하여 humanoid robot의 bipedal gait 학습을 위한 실용적인 framework를 제시한다. H-LIP 기반 decoupling과 structured reward composition의 조합이 학습 효율성과 periodicity를 동시에 향상시키는 점에서 기술적 독창성이 있으나, 물리 실험 검증과 복잡한 환경 적응성 평가가 추가되면 더욱 강화될 것이다.