저자: Zhengyi Luo, Chen Tessler, Toru Lin, Ye Yuan, Tairan He, Wenli Xiao, Yunrong Guo, Gal Chechik, Kris Kitani, Linxi Fan, Yuke Zhu | 날짜: 2025-05-18 | URL: https://arxiv.org/abs/2505.12278 📄 PDF
Essence
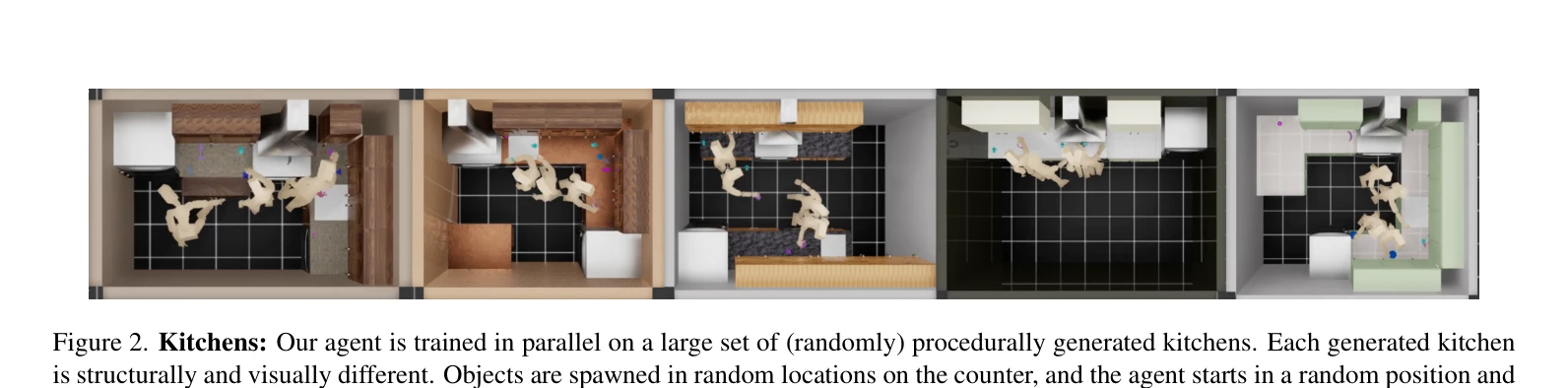
Figure 1. Perceptive Dexterous Control (PDC) enables a humanoid equipped with egocentric vision to search for, reach, gr
본 논문은 egocentric vision만을 사용하여 simulated humanoid가 복잡한 household tasks를 수행하도록 하는 Perceptive Dexterous Control (PDC) 프레임워크를 제안하며, visual perception을 task specification의 인터페이스로 활용하여 active search 등의 emergent behaviors를 유도한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 egocentric vision을 유일한 정보원으로 하는 humanoid whole-body dexterous control의 실현이라는 도전적 문제를 perception-as-interface 패러다임과 hierarchical RL을 통해 창의적으로 해결하며, emergent active search behaviors의 명시적 입증을 통해 vision-driven control의 이점을 새롭게 조명한다.