Essence
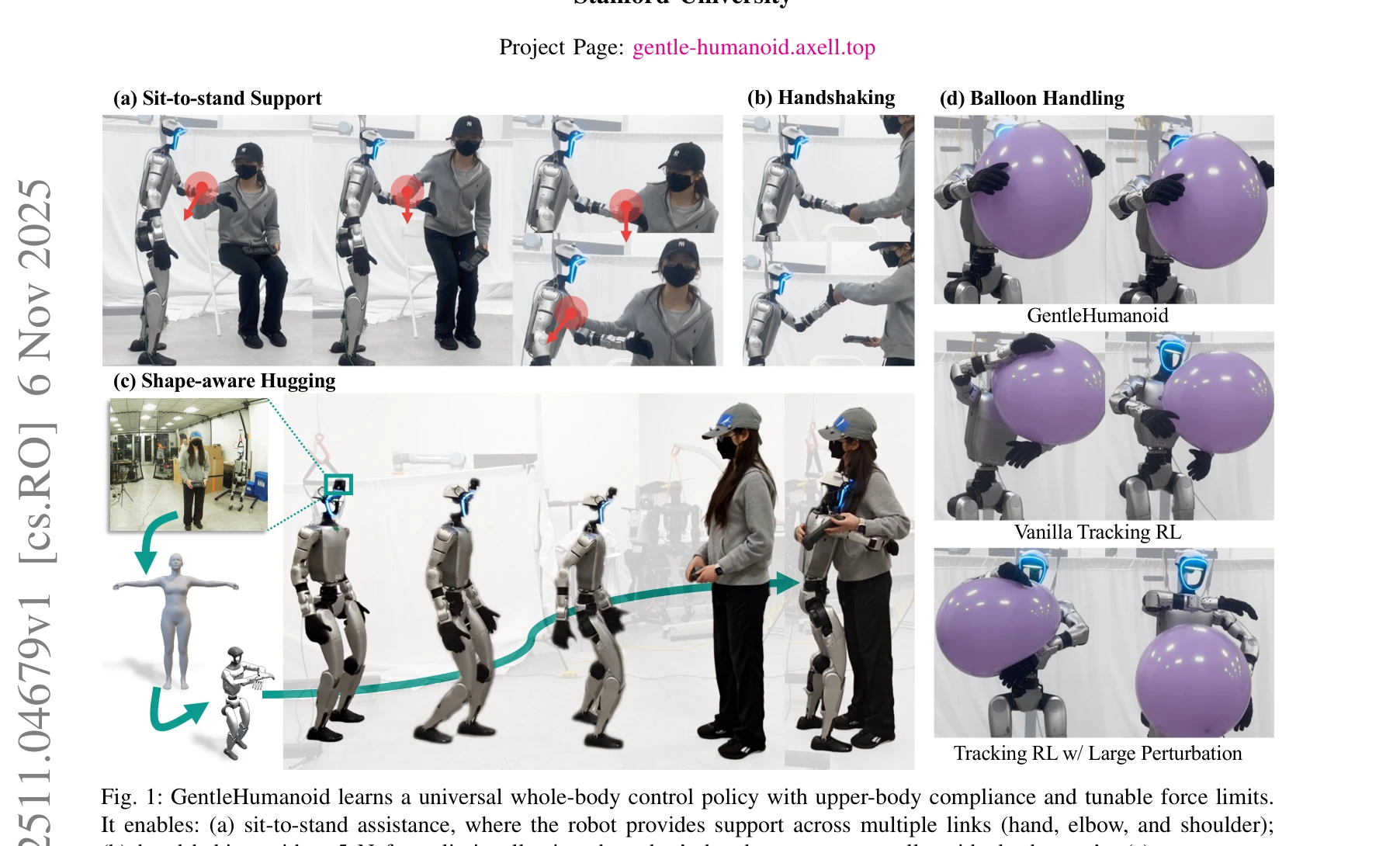
Fig. 1: GentleHumanoid learns a universal whole-body control policy with upper-body compliance and tunable force limits.
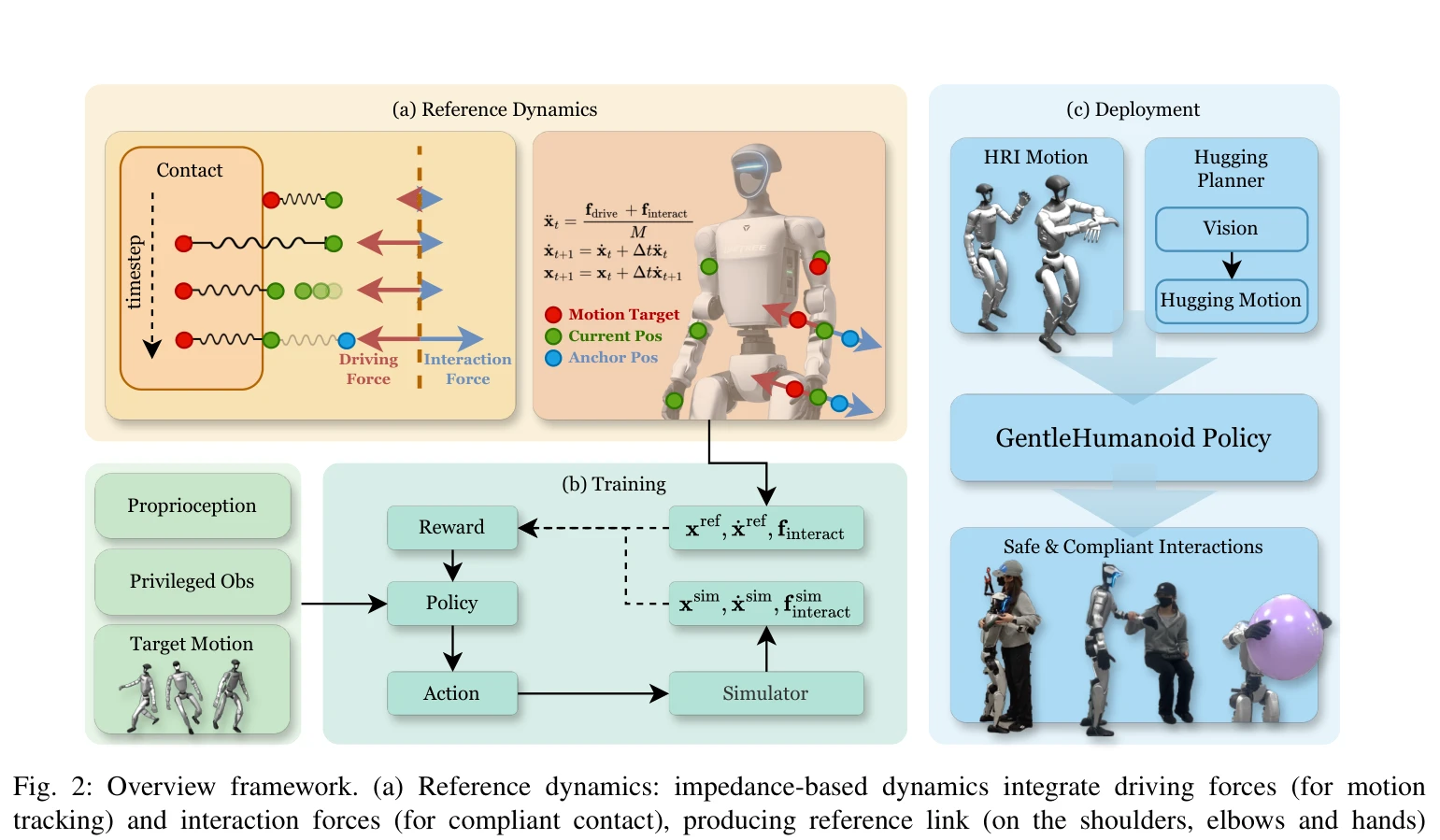
GentleHumanoid는 impedance control을 whole-body motion tracking 정책에 통합하여 humanoid 로봇의 상체 compliance를 학습하는 프레임워크이다. 이는 human motion data에서 샘플링한 spring-based formulation을 통해 resistive contact와 guiding contact를 통일적으로 모델링한다.