Essence
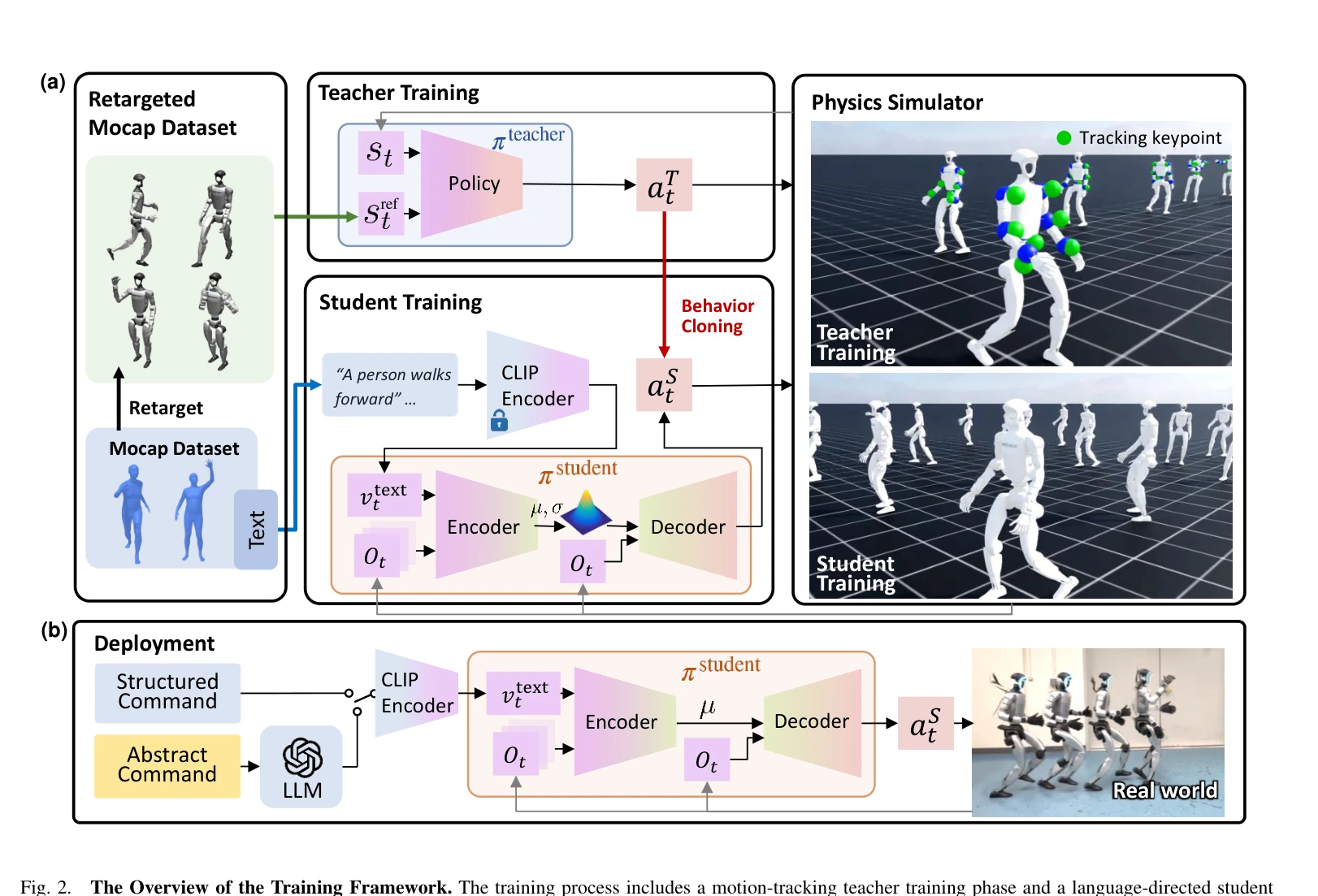
Fig. 2.
자연언어 명령을 humanoid robot의 전신 제어 동작으로 직접 변환하는 end-to-end 학습 프레임워크를 제시한다. Reinforcement learning으로 학습한 teacher policy와 CVAE 기반 student policy를 결합하여 언어-행동의 통합 latent space를 구성한다.
저자: Yiyang Shao, Xiaoyu Huang, Bike Zhang, Qiayuan Liao, Yuman Gao, Yufeng Chi, Zhongyu Li, Sophia Shao, Koushil Sreenath | 날짜: 2025-04-30 | URL: https://arxiv.org/abs/2504.21738 📄 PDF
Fig. 2.
자연언어 명령을 humanoid robot의 전신 제어 동작으로 직접 변환하는 end-to-end 학습 프레임워크를 제시한다. Reinforcement learning으로 학습한 teacher policy와 CVAE 기반 student policy를 결합하여 언어-행동의 통합 latent space를 구성한다.
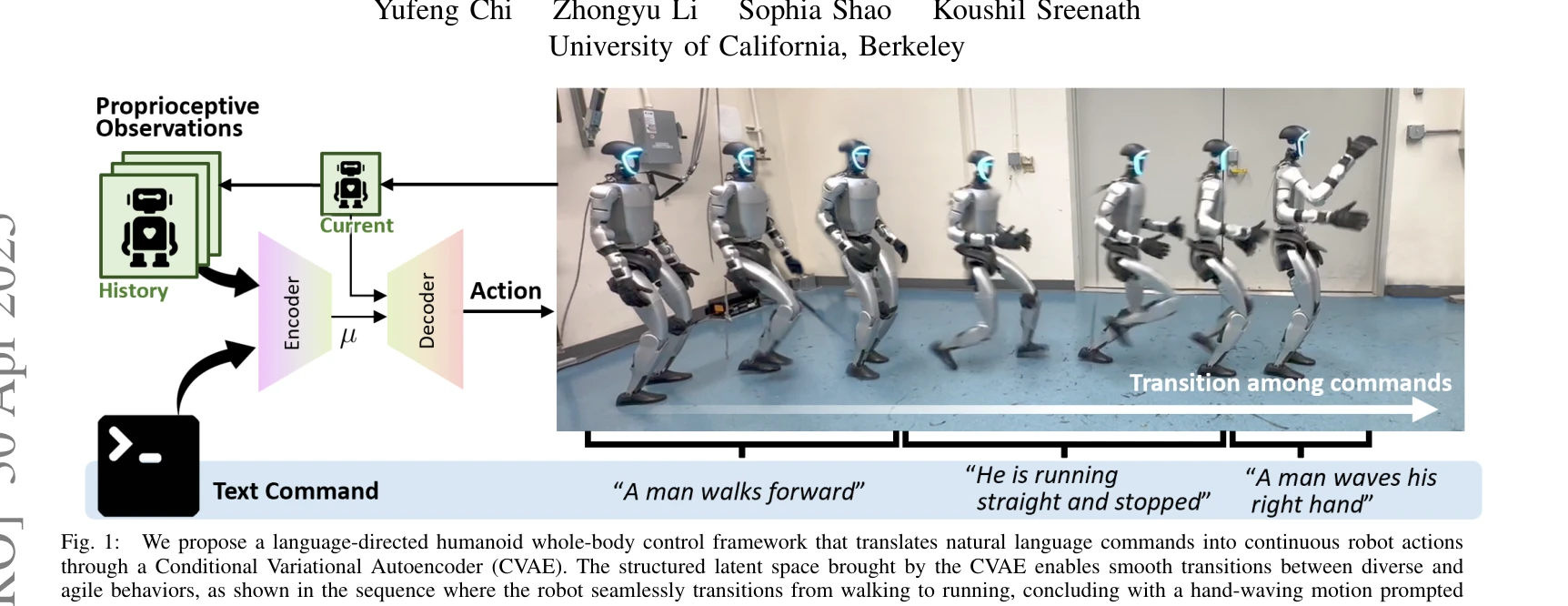
Fig. 1:
Fig. 2.
총평: 본 논문은 humanoid 전신 제어의 오랜 난제인 언어-행동 갭을 end-to-end learning으로 직접 해결하며, CVAE 기반의 unified latent space 구성으로 동작 다양성과 부드러운 전환을 동시에 달성한 점이 우수하다. 실제 로봇 검증과 강건성 입증을 통해 현실 적용 가능성을 보였으나, 데이터셋 의존성과 다양한 플랫폼 일반화에 대한 추가 검증이 필요하다.