Essence
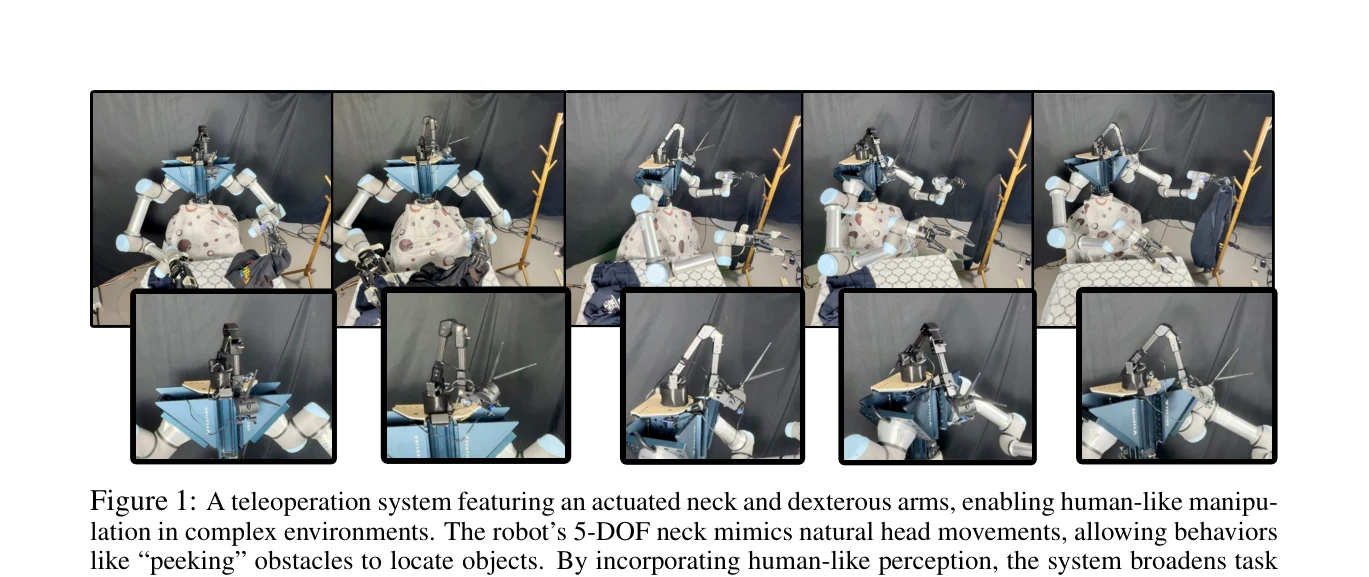
Figure 1: A teleoperation system featuring an actuated neck and dexterous arms, enabling human-like manipu-
인간의 자연스러운 머리 움직임을 모방하는 5-DOF actuated neck을 원격 조종 시스템에 통합하여 작업자의 직관성 향상, 인지 부하 감소, 자율 정책 학습 개선을 달성하는 연구이다.
저자: Bipasha Sen, Michelle Wang, Nandini Thakur, Aditya Agarwal, Pulkit Agrawal | 날짜: 2024-11-01 | URL: https://arxiv.org/abs/2411.00704 📄 PDF
Figure 1: A teleoperation system featuring an actuated neck and dexterous arms, enabling human-like manipu-
인간의 자연스러운 머리 움직임을 모방하는 5-DOF actuated neck을 원격 조종 시스템에 통합하여 작업자의 직관성 향상, 인지 부하 감소, 자율 정책 학습 개선을 달성하는 연구이다.
Figure 1: A teleoperation system featuring an actuated neck and dexterous arms, enabling human-like manipu-
총평: 이 논문은 인간의 자연스러운 지각 능력을 원격 조종 시스템에 구현한 혁신적 접근으로, 직관성 향상과 자율 정책 학습 개선에 대한 실증적 증거를 제시한다. 다만 평가 작업의 범위 확대와 기술적 한계 개선을 통해 더욱 강화될 수 있다.