저자: Hao Huang, Geeta Chandra Raju Bethala, Shuaihang Yuan, Congcong Wen, Mengyu Wang, Anthony Tzes, Yi Fang | 날짜: 2026-04-07 | DOI: 10.48550/arXiv.2510.25241 📄 PDF
Essence
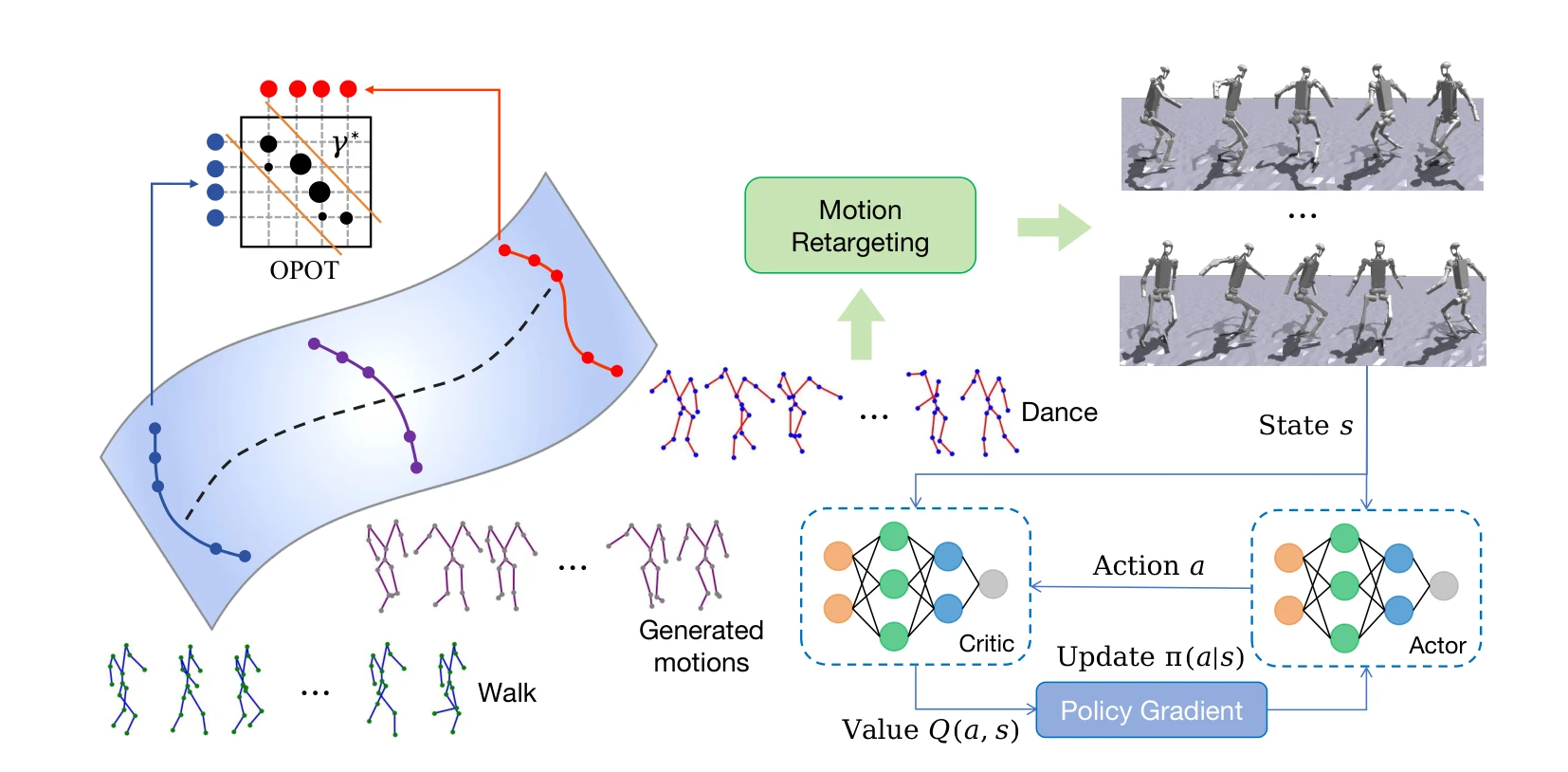
Figure 2. Given a sequence of walking motion pose skeletons and a target sequence comprising non-walking motions, we emp
단일 비보행 대상 샘플과 보행 사전 지식을 활용하여 휴머노이드 전신 운동을 원샷 적응하는 데이터 효율적 방법을 제안한다. Order-preserving optimal transport를 통해 보행과 비보행 시퀀스 간 거리를 계산하고 geodesic 보간으로 중간 포즈를 생성한 후 강화학습으로 정책을 적응한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 휴머노이드 전신 운동에 원샷 학습을 효과적으로 적용하고, order-preserving optimal transport와 manifold 최적화를 통해 경량의 데이터 효율적 솔루션을 제시하는 높은 가치의 연구이다. 다만 실제 로봇 검증과 더 다양한 보조 모션 확장이 후속 과제이다.
