Essence
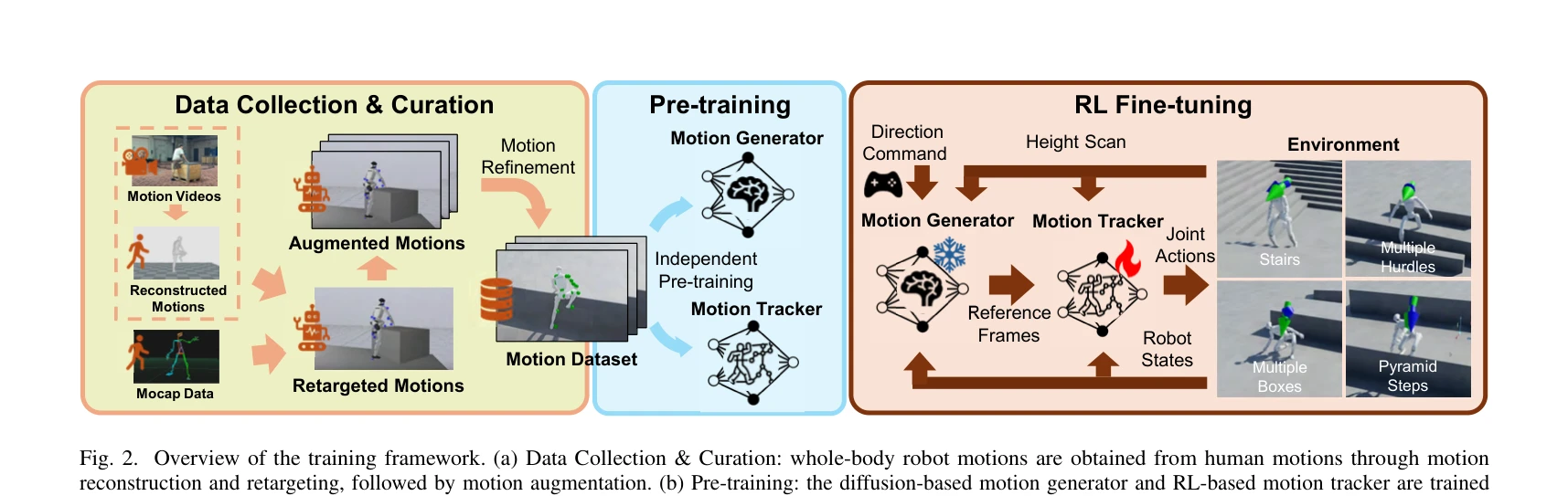
Fig. 2. Overview of the training framework. (a) Data Collection & Curation: whole-body robot motions are obtained from h
Diffusion 기반 motion generation과 RL 기반 motion tracking을 결합하여 지형 인식 whole-body humanoid locomotion을 실현하고 Unitree G1 로봇에 실제 배포했다.