Essence
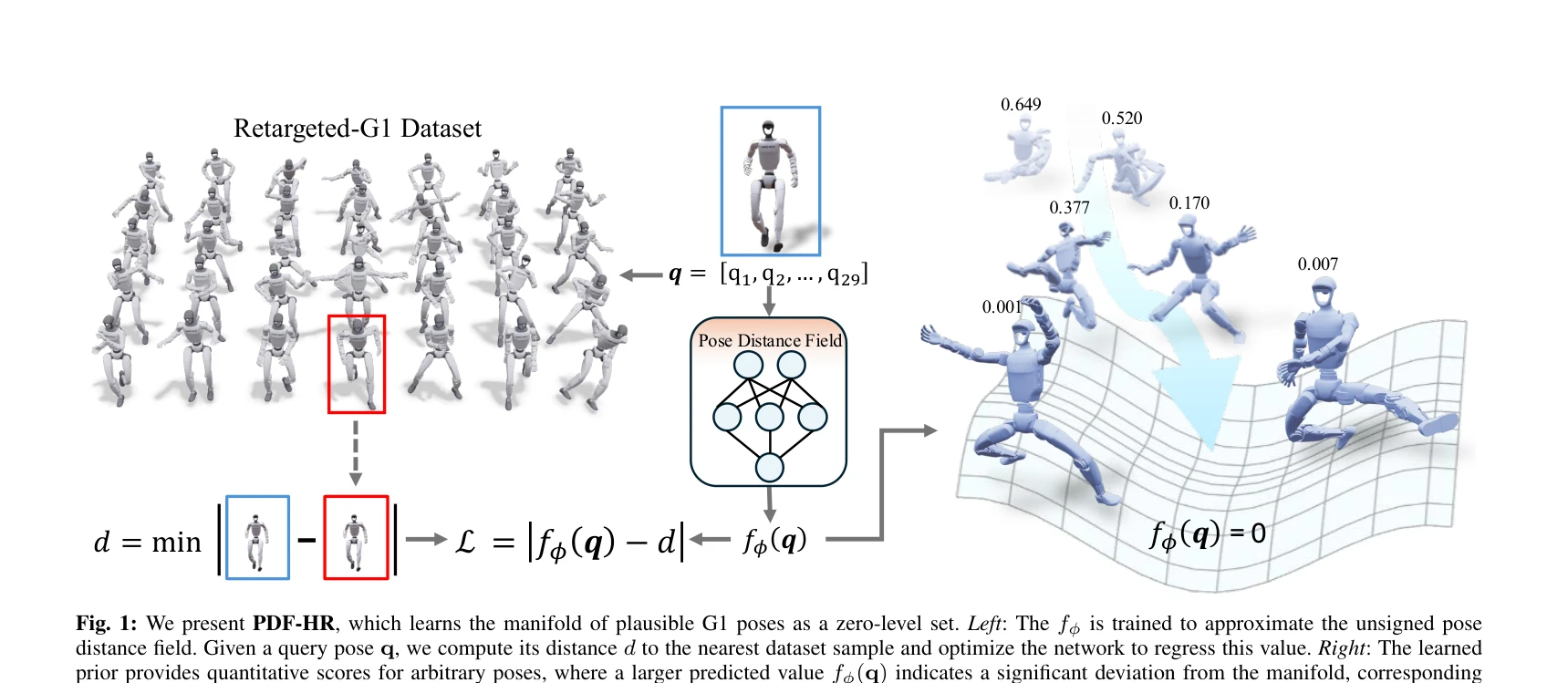
Fig. 1: We present PDF-HR, which learns the manifold of plausible G1 poses as a zero-level set. Left: The fϕ is trained
Humanoid 로봇을 위한 pose distance field인 PDF-HR을 제안하여, 학습된 로봇 포즈 분포를 연속 미분 가능한 manifold로 표현하고 포즈의 plausibility를 평가한다.
저자: Yi Gu, Yukang Gao, Yangchen Zhou, Xingyu Chen, Yixiao Feng, Mingle Zhao, Yunyang Mo, Zhaorui Wang, Lixin Xu, Renjing Xu | 날짜: 2026-02-04 | DOI: 10.48550/arXiv.2602.04851 📄 PDF
Fig. 1: We present PDF-HR, which learns the manifold of plausible G1 poses as a zero-level set. Left: The fϕ is trained
Humanoid 로봇을 위한 pose distance field인 PDF-HR을 제안하여, 학습된 로봇 포즈 분포를 연속 미분 가능한 manifold로 표현하고 포즈의 plausibility를 평가한다.
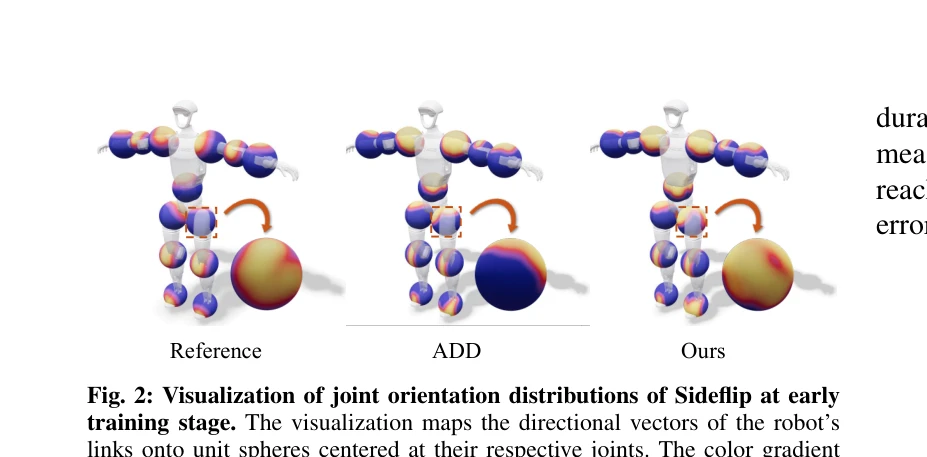
Fig. 2: Visualization of joint orientation distributions of Sideflip at early
총평: 이 논문은 humanoid robotics에 implicit manifold representation을 처음 적용하여 scarce data 문제를 효과적으로 해결하고, lightweight하면서도 재사용 가능한 pose prior를 제안한 점에서 높은 학술적 기여를 한다. 다양한 task에서 일관된 성능 향상을 보이며 실용적 가치도 우수하나, corpus 의존성과 temporal modeling의 미흡이 향후 개선 과제이다.