Essence
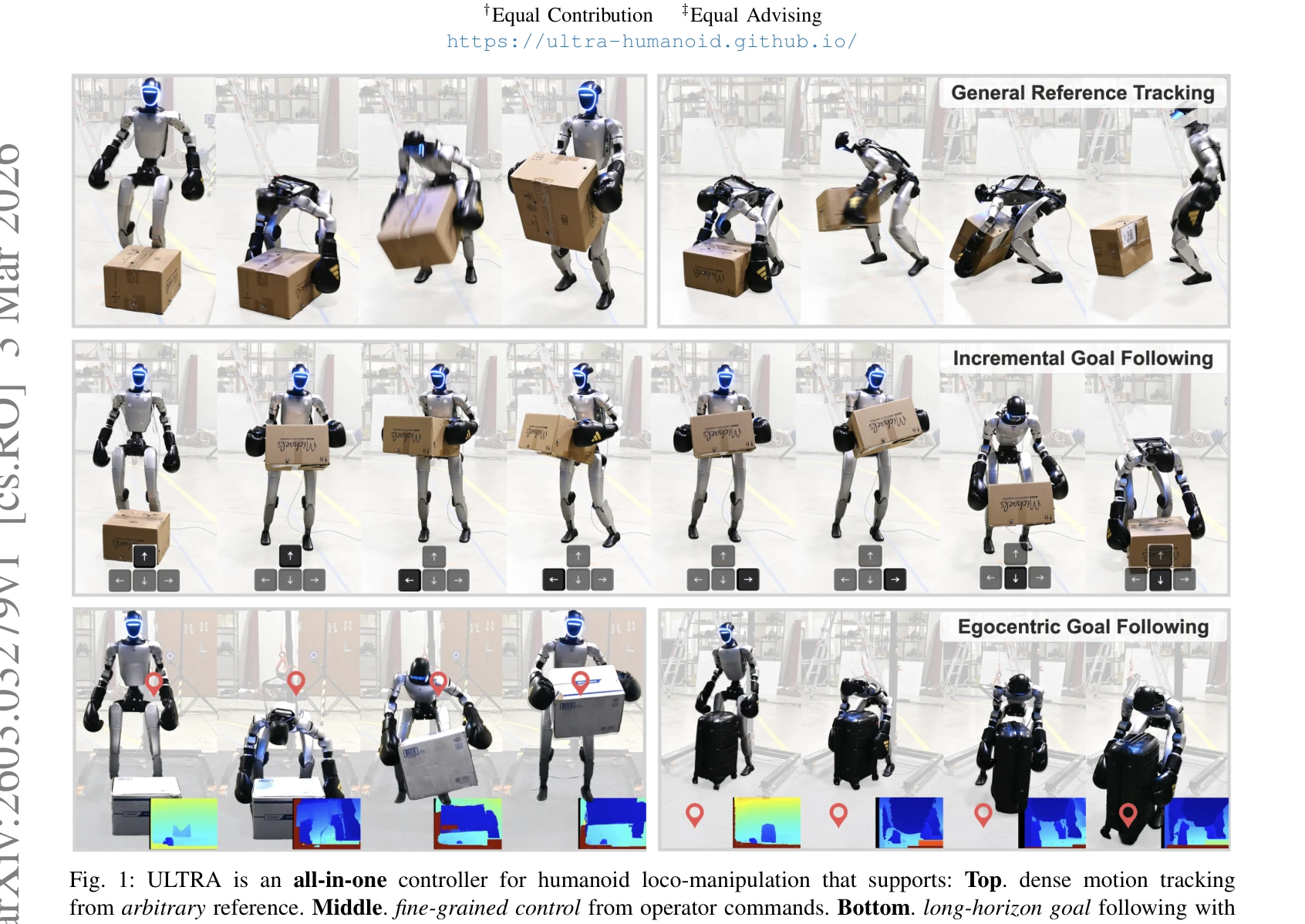
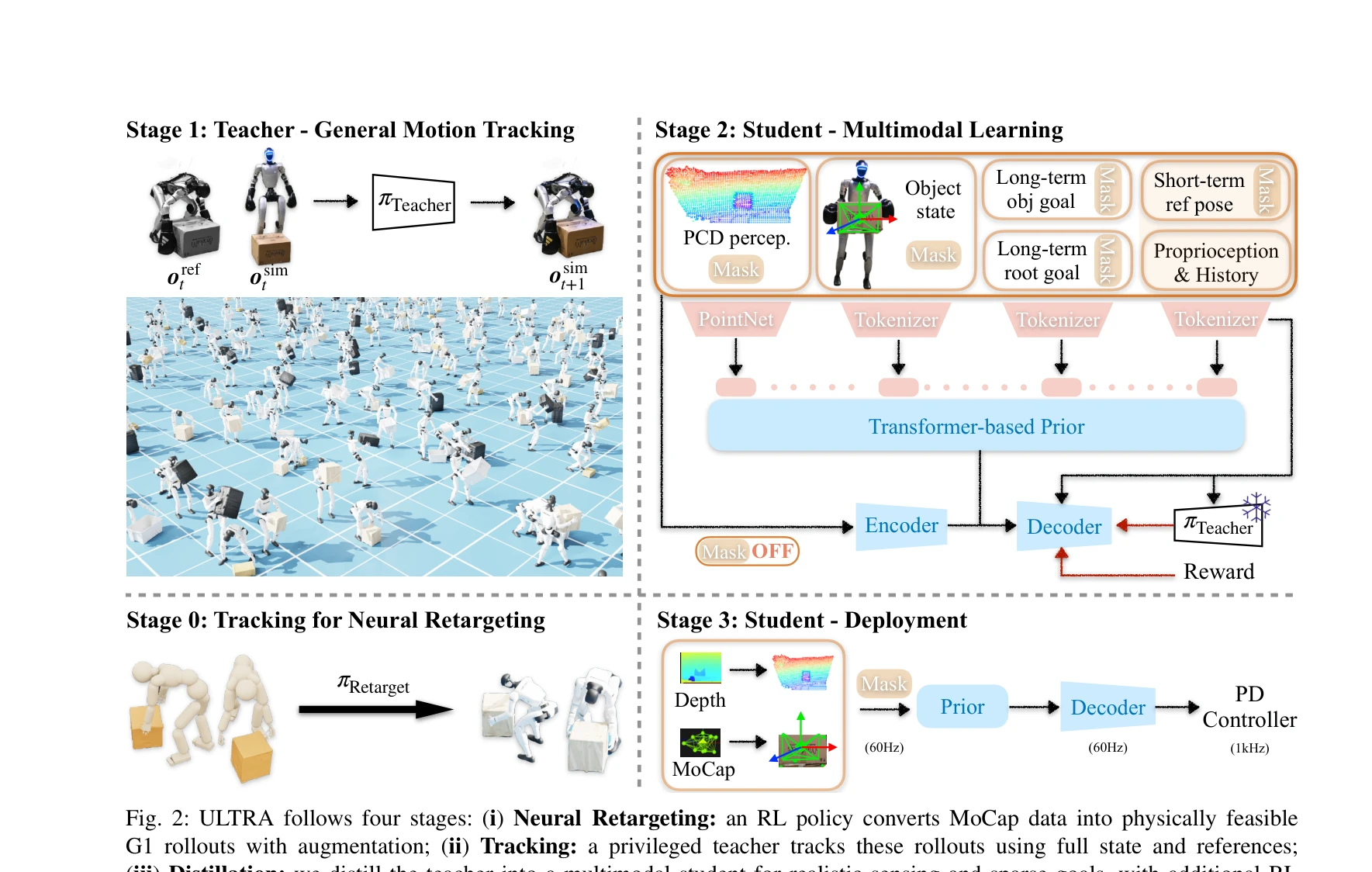
Fig. 1: ULTRA is an all-in-one controller for humanoid loco-manipulation that supports: Top. dense motion tracking
물리 기반 신경 retargeting과 unified multimodal controller를 결합하여 humanoid 로봇이 dense reference tracking과 sparse goal-conditioning을 모두 지원하며, egocentric 시각 인지 기반 자율적 전신 loco-manipulation을 수행할 수 있는 프레임워크이다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 이 논문은 humanoid loco-manipulation의 두 가지 근본적인 병목(물리적 retargeting과 통합 컨트롤)을 체계적으로 해결하며, physics-driven retargeting과 multimodal distillation의 조합으로 실제 배포 환경에서의 자율성을 크게 향상시킨다. 특히 unified framework로 diverse 조건 신호를 처리하고 real-world 평가를 제시한 점에서 학술적 및 실용적 의의가 높다.