저자: Zhenguo Sun, Bo-Sheng Huang, Yibo Peng, Xukun Li, Jingyu Ma, Yu Sun, Zhe Li, Haojun Jiang, Biao Gao, Zhenshan Bing, Xinlong Wang, Alois Knoll | 날짜: 2026-02-11 | DOI: 10.48550/arXiv.2602.08594 📄 PDF
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
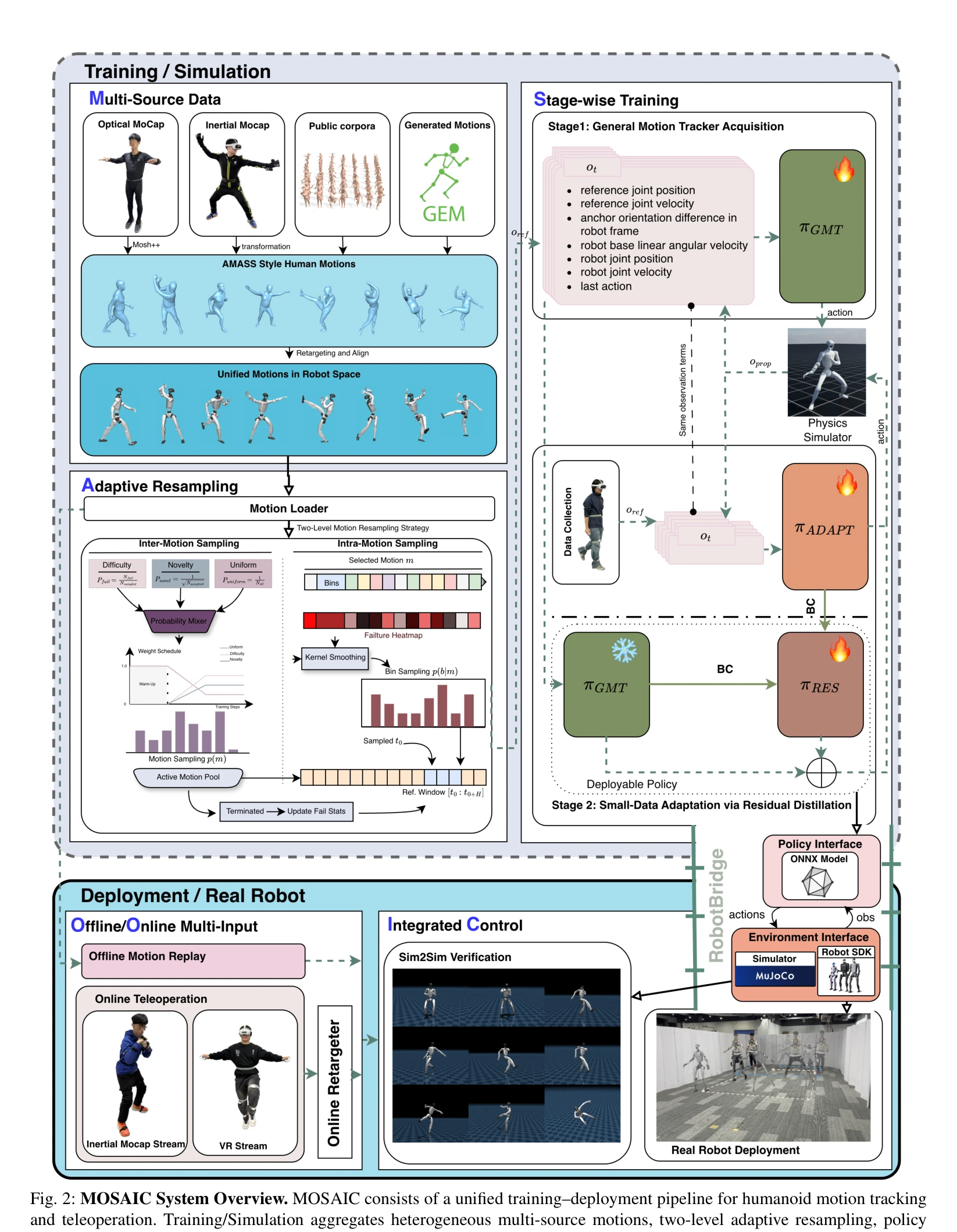
총평: MOSAIC는 시뮬레이션-실제 로봇 간 격차를 체계적으로 해결하기 위해 텔레오퍼레이션 지향의 RL 설계와 residual adaptation을 결합한 실용적이고 잘 설계된 시스템으로, RobotBridge 프레임워크와 함께 공개되어 재현성과 확장성을 크게 향상시킨다. 다만 완전한 zero-shot adaptation과 다양한 embodiment에 대한 더욱 강력한 일반화가 향후 과제이다.