Achievement
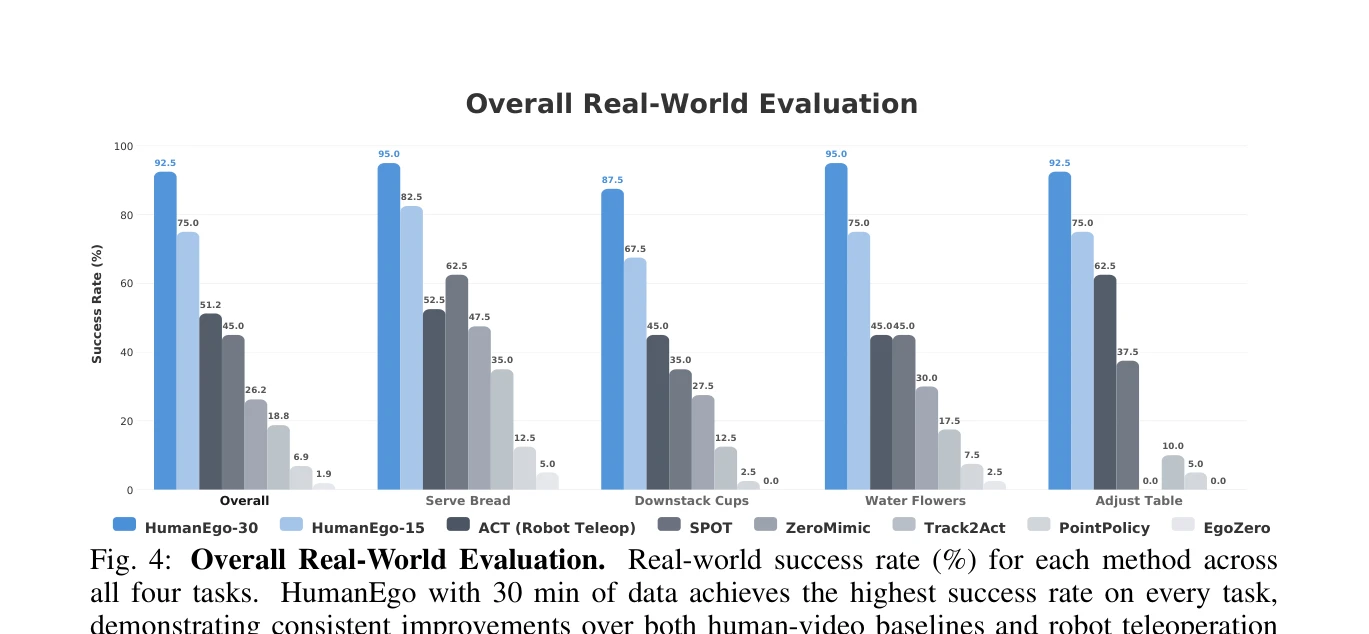
Fig. 4: Overall Real-World Evaluation. Real-world success rate (%) for each method across
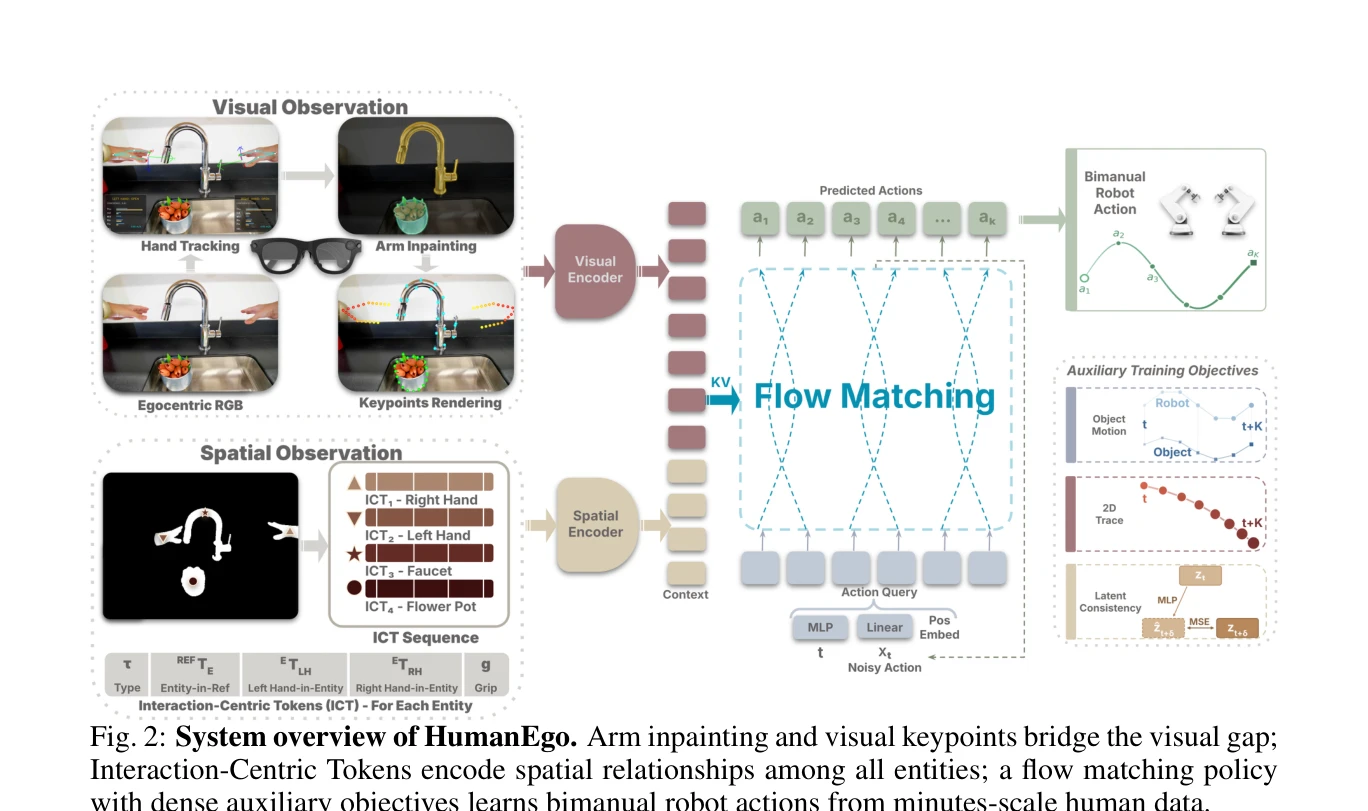
- HumanEgo 프레임워크: 로봇 데이터 없이도 인간 자아중심 영상 30분(또는 15분)만으로 실제 환경에서 92.5%(또는 75%) 성공률 달성
- Interaction-Centric Tokens(ICT): 구체화, 시점, 환경 불변의 콤팩트 손-물체 상호작용 표현
- Zero-shot 전이: 새로운 로봇 구체화, 카메라 설정, 조명, 배경, 물체에 재학습 없이 전이 가능
- 성능 비교: 동일 수집 시간의 로봇 teleoperation보다 41% 우수한 성능