Essence
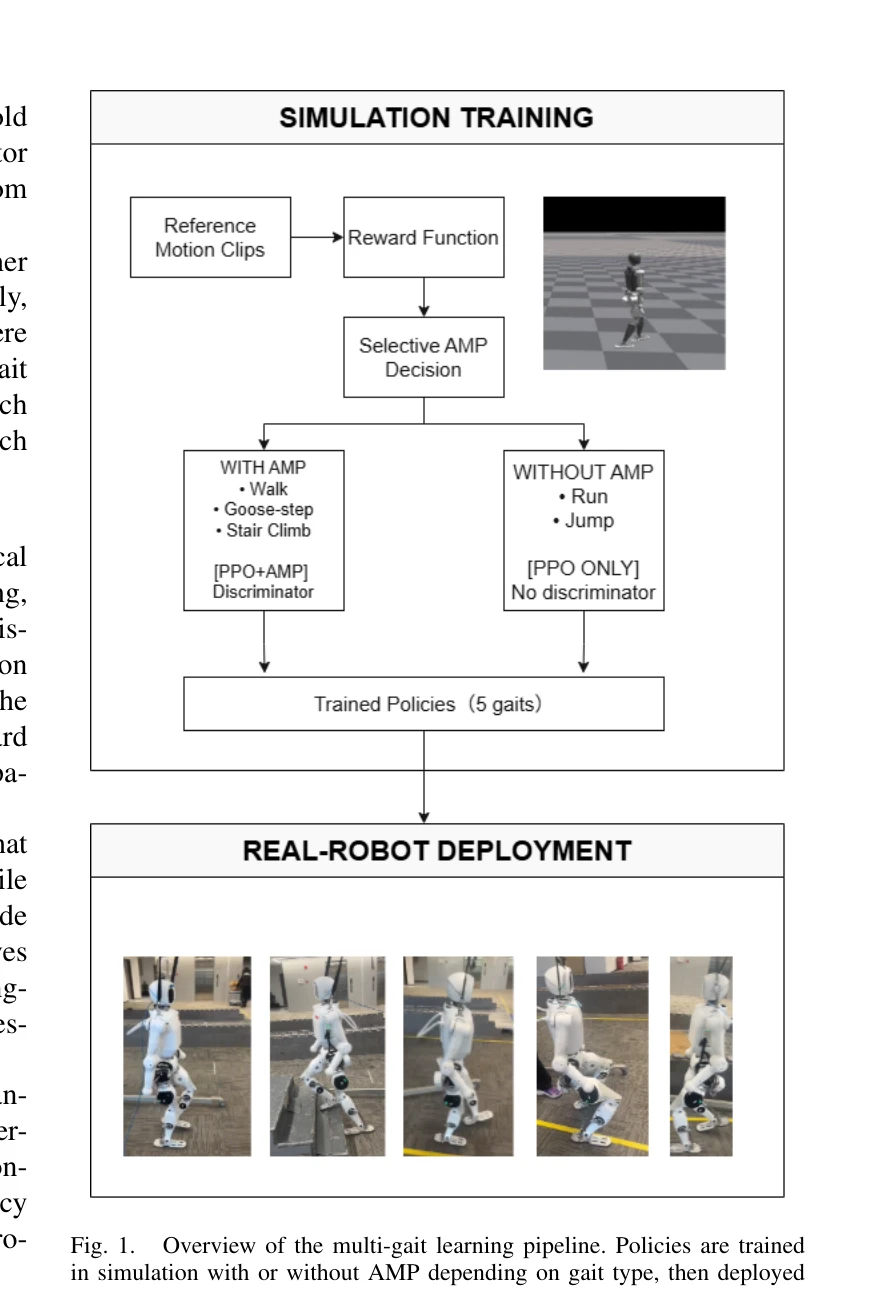
Fig. 1.
본 논문은 humanoid robot이 보행, 거위걸음, 달리기, 계단 오르기, 점프 등 5가지 서로 다른 보행 방식을 통일된 강화학습 프레임워크로 학습할 수 있도록 하는 선택적 Adversarial Motion Prior (AMP) 전략을 제안한다.
저자: Yuanye Wu, Keyi Wang, Linqi Ye, Boyang Xing | 날짜: 2026-04-21 | URL: https://arxiv.org/abs/2604.19102 📄 PDF
Fig. 1.
본 논문은 humanoid robot이 보행, 거위걸음, 달리기, 계단 오르기, 점프 등 5가지 서로 다른 보행 방식을 통일된 강화학습 프레임워크로 학습할 수 있도록 하는 선택적 Adversarial Motion Prior (AMP) 전략을 제안한다.
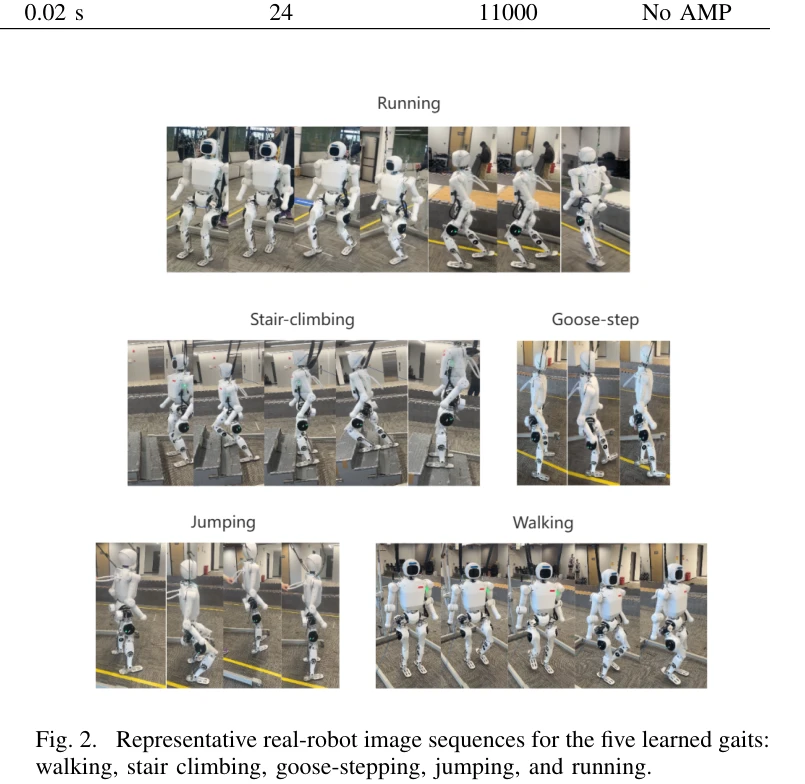
Fig. 2. Representative real-robot image sequences for the five learned gaits:
Fig. 1.
총평: 본 논문은 humanoid robot의 다중 보행 학습에서 AMP의 선택적 적용이라는 창의적인 아이디어를 제시하고, 통일된 강화학습 프레임워크로 5가지 이질적 보행을 성공적으로 학습 및 실로봇 배포한 것으로 실무적 가치가 높다. 다만 선택 기준의 일반화 부족과 단일 로봇 플랫폼 검증이라는 한계가 있어 추가 확장 연구가 필요하다.