Essence
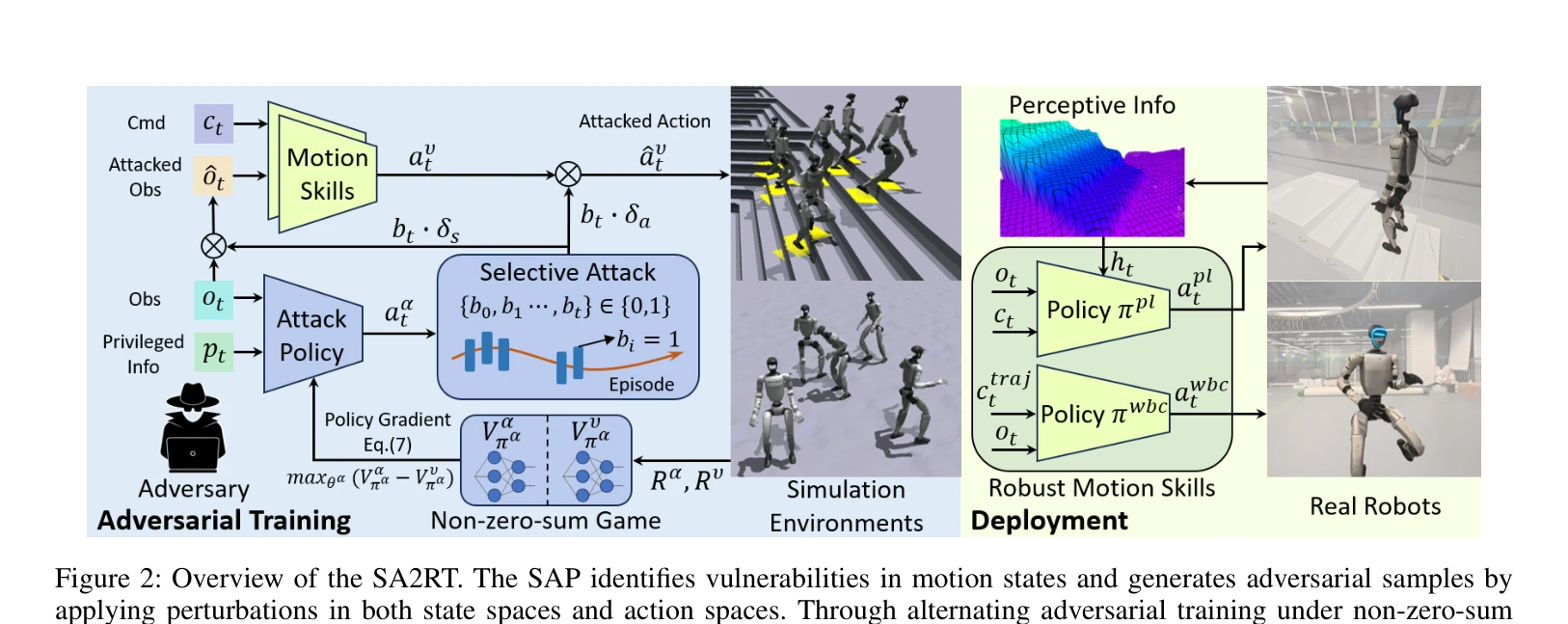
Figure 2: Overview of the SA2RT. The SAP identifies vulnerabilities in motion states and generates adversarial samples b
인간형 로봇의 장시간 안정적 운영을 위해 선택적 적대적 공격(SA2RT)을 통한 견고한 동작 제어 정책을 학습하는 방법을 제안한다. 공격 예산 제약 하에서 취약한 상태와 행동을 찾아 표적화된 섭동을 가하여 정책을 강화한다.