Essence
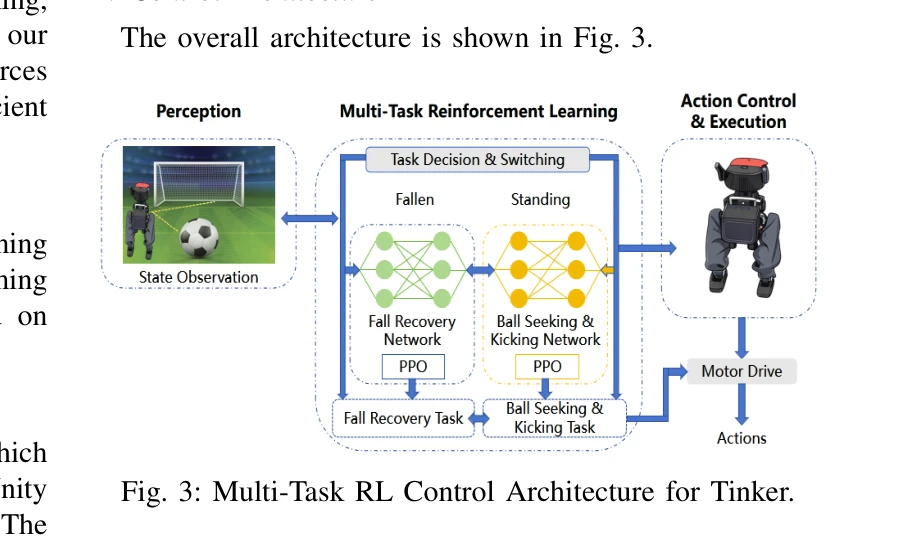
Fig. 3: Multi-Task RL Control Architecture for Tinker.
이 논문은 이족 로봇 축구에서 기본 보행과 복잡한 작업(공 찾기, 킥, 낙상 회복)의 깊은 결합 문제를 해결하기 위해 CPG 기반 feedforward oscillator와 RL 기반 residual action을 결합한 모듈식 강화학습 제어 프레임워크를 제안한다.
저자: Yulai Zhang, Yinrong Zhang, Ting Wu, Linqi Ye | 날짜: 2026-04-21 | URL: https://arxiv.org/abs/2604.19104 📄 PDF
Fig. 3: Multi-Task RL Control Architecture for Tinker.
이 논문은 이족 로봇 축구에서 기본 보행과 복잡한 작업(공 찾기, 킥, 낙상 회복)의 깊은 결합 문제를 해결하기 위해 CPG 기반 feedforward oscillator와 RL 기반 residual action을 결합한 모듈식 강화학습 제어 프레임워크를 제안한다.
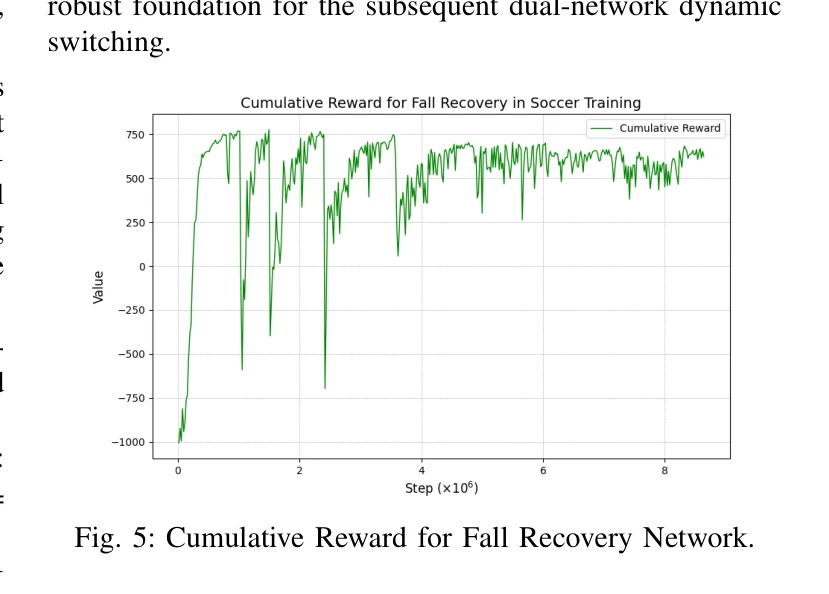
Fig. 5: Cumulative Reward for Fall Recovery Network.
총평: 이 논문은 이족 로봇 축구의 핵심 과제들을 체계적으로 해결하는 효과적인 모듈식 제어 프레임워크를 제시하며, CPG-residual 하이브리드 제어와 posture 기반 상태 전환 메커니즘은 높은 독창성을 보여준다. 다만 실제 하드웨어 검증 부재와 타 방법론과의 비교 분석 부족이 영향력을 제한하며, 이들이 보충된다면 이족 로봇 제어 분야에서 실질적 기여를 할 수 있을 것으로 판단된다.