Essence
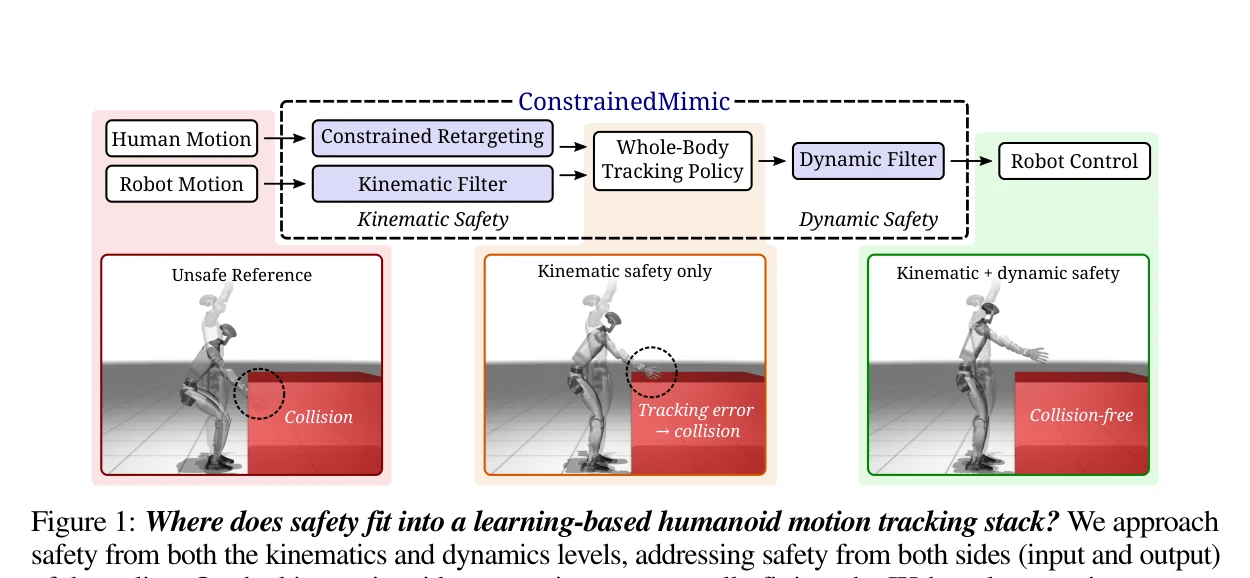
Figure 1: Where does safety fit into a learning-based humanoid motion tracking stack? We approach
본 논문은 강화학습 기반 인간형 로봇의 전신 모션 추적 제어에서 안전 제약조건을 실시간으로 강제하는 ConstrainedMimic 프레임워크를 제시한다. operational space control과 control barrier functions을 결합하여 kinematics와 dynamics 차원에서 실행시간 제약조건을 만족시킨다.
Achievement
Figure 1: Where does safety fit into a learning-based humanoid motion tracking stack? We approach
제약조건 강제 방법 세 가지 제시: constrained retargeting, kinematic filter, dynamic filter를 contact-constrained kinematics/dynamics 위에서 구성. 실시간 실행 가능: CPU, GPU, TPU에서 300-500 Hz 배포 가능. 전신 추적 정책 호환성: 사전 훈련된 정책 수정 없이 collision avoidance, joint limits, center of mass stability 제약조건 만족 시연.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 humanoid 전신 제어에서 contact-constrained 동역학을 통한 체계적이고 실용적인 안전 강제 방법을 제시한다. Kinematics와 dynamics 양단 필터링, task-consistent 설계, 실시간 실행 가능성은 주목할 만하나, 실하드웨어 검증과 충돌 모델 확장이 필요하다.