Essence
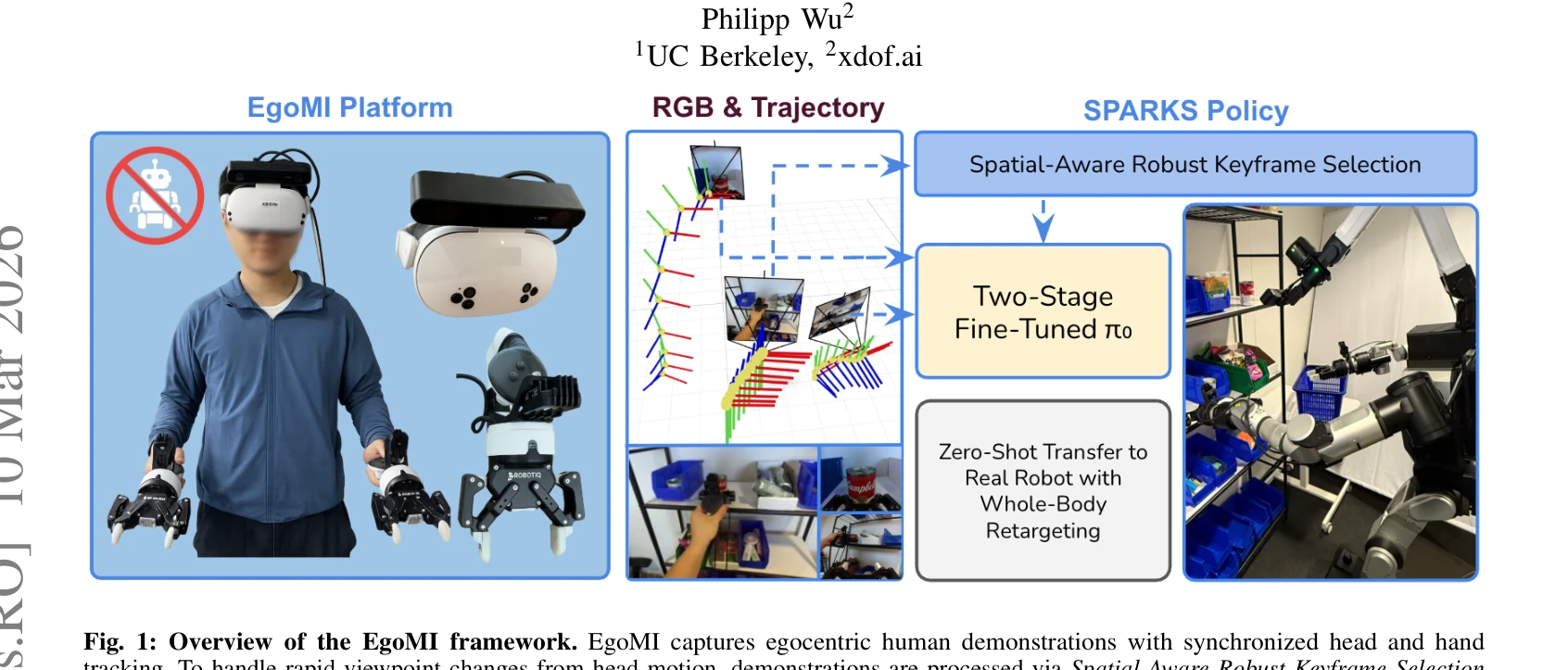
Fig. 1: Overview of the EgoMI framework. EgoMI captures egocentric human demonstrations with synchronized head and hand
EgoMI는 인간의 동시화된 머리 및 손 움직임을 포착하는 egocentric 데이터 수집 프레임워크로, SPARKS 메모리 메커니즘을 통해 급속한 시점 변화를 처리하여 반인간형 로봇으로 zero-shot 전이를 달성한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: EgoMI는 인간의 active vision과 manipulation을 동시에 포착하는 창의적 프레임워크로, SPARKS 메커니즘을 통해 급속한 시점 변화를 우아하게 처리하며 zero-shot transfer를 달성해 imitation learning의 embodiment gap 문제에 실질적 솔루션을 제시한다.