Essence
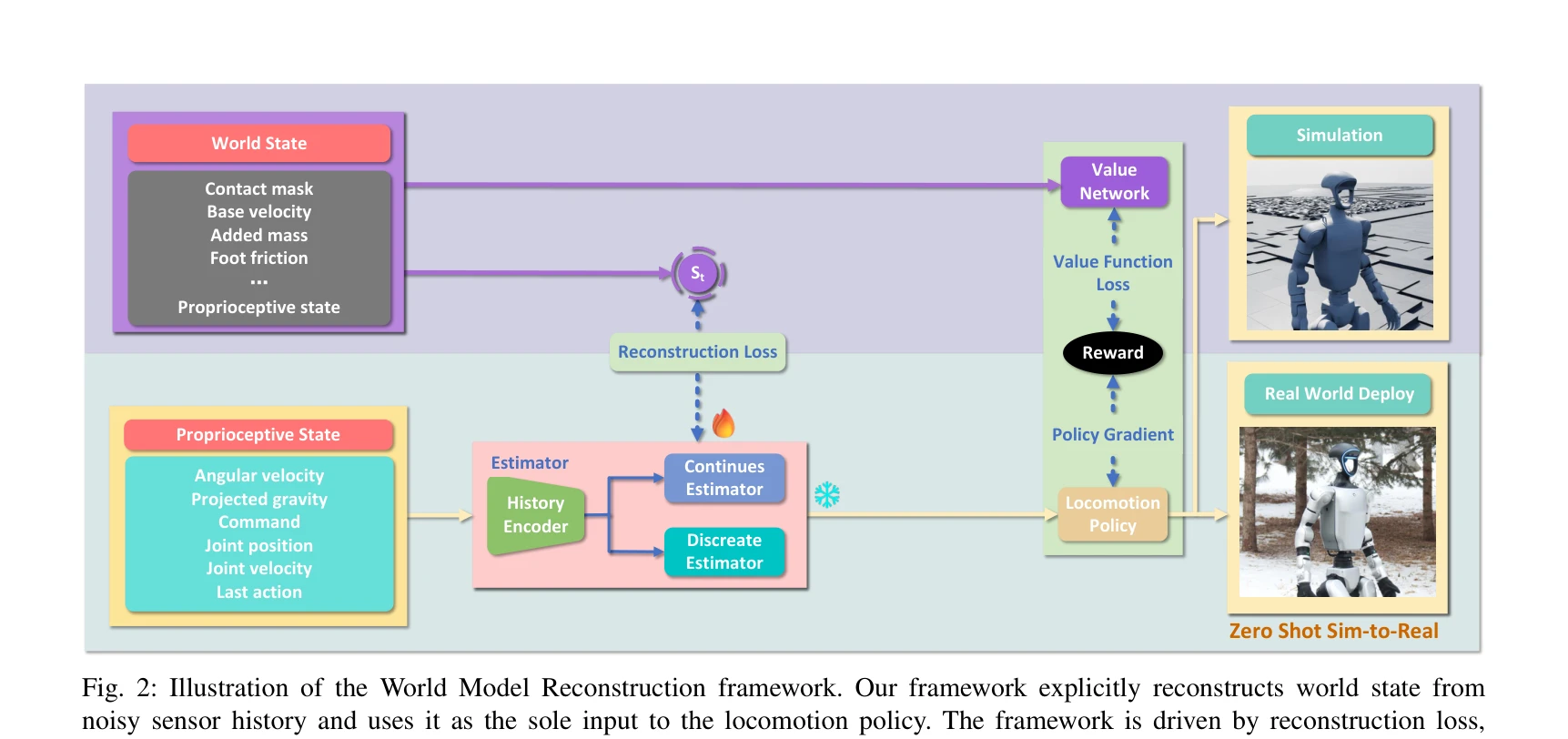
Fig. 2: Illustration of the World Model Reconstruction framework. Our framework explicitly reconstructs world state from
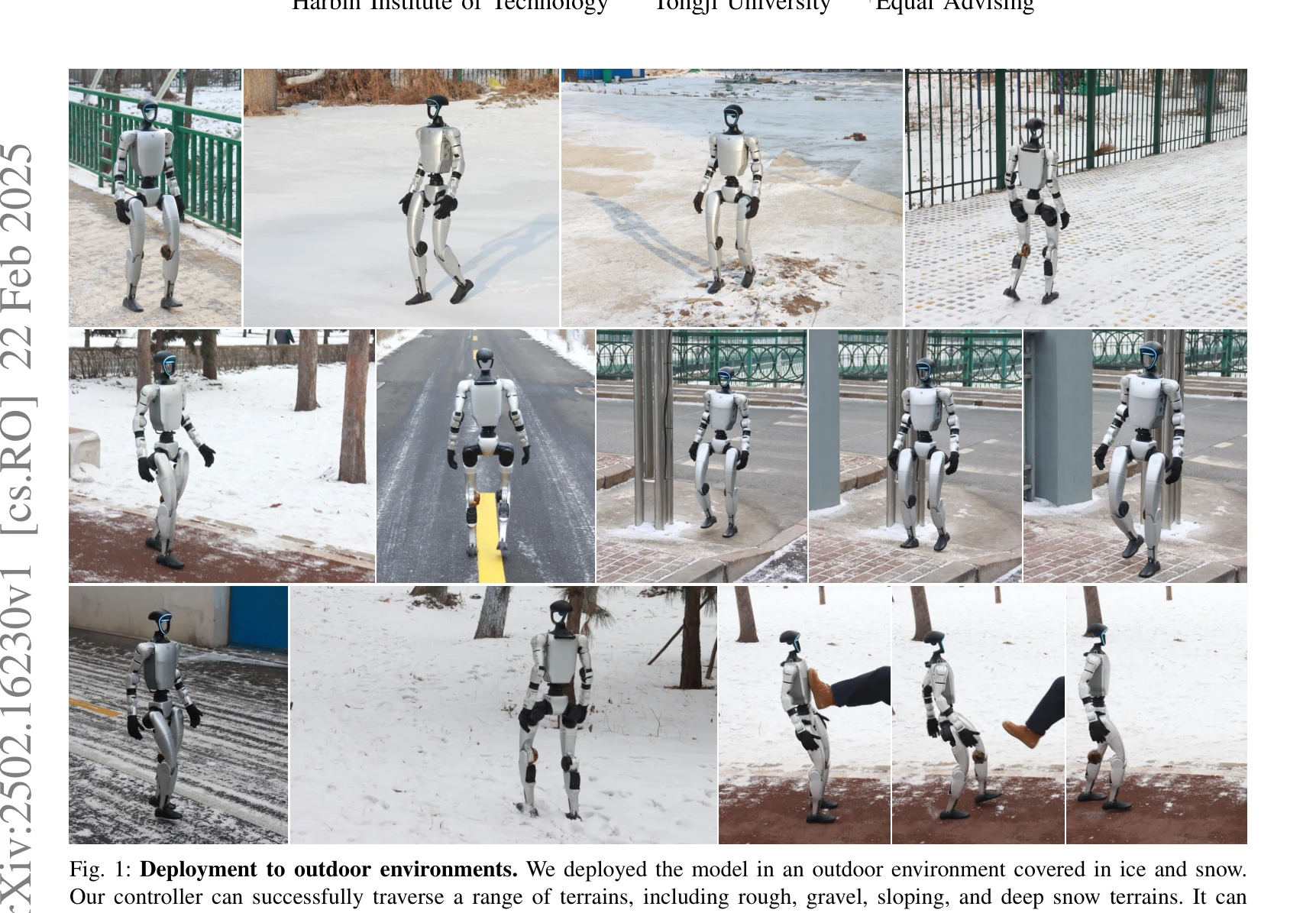
본 논문은 humanoid robot의 blind locomotion을 위해 World Model Reconstruction (WMR)을 제안한다. 센서 노이즈로부터 world state를 명시적으로 재구성하고, gradient cutoff를 통해 estimator와 policy를 독립적으로 학습시킴으로써 실제 복잡한 지형에서의 견고한 주행을 실현한다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 humanoid 로봇의 blind locomotion을 위한 명시적 world model reconstruction의 효과를 체계적으로 입증하고, gradient cutoff 메커니즘을 통해 estimation과 policy learning의 충돌을 창의적으로 해결한다. 단일 학습 단계로 복잡한 실제 지형에서의 장거리 주행을 달성한 것은 실질적 임팩트가 크며, 3.2 km hike의 구체적 성과는 방법의 실효성을 명확히 보여준다. 다만 단일 로봇 플랫폼 실험과 failure case 분석의 부족이 아쉬우나, 전체적으로 humanoid locomotion 분야에 의미있는 기여를 하는 고품질 연구이다.