Essence
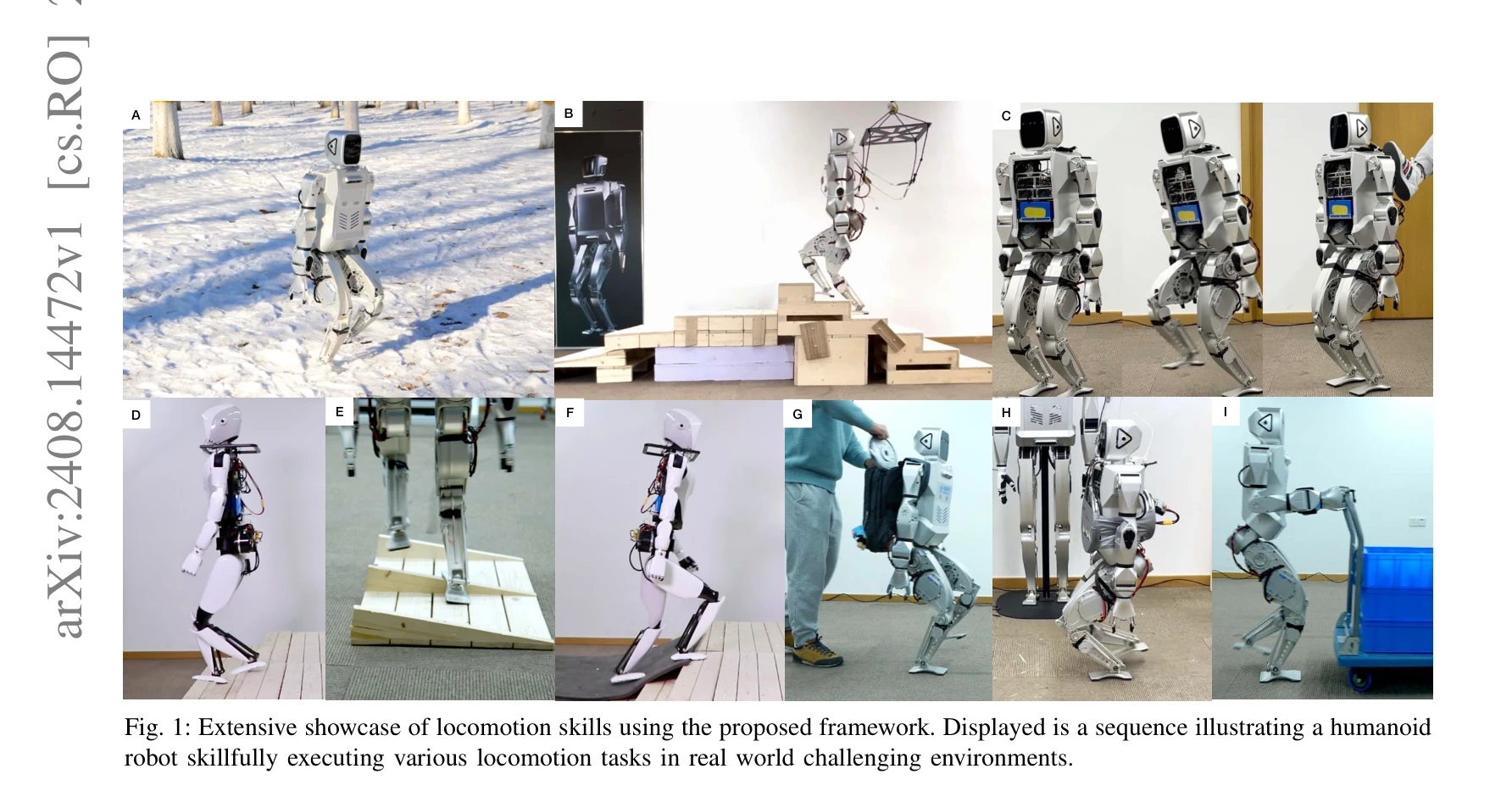
Fig. 1: Extensive showcase of locomotion skills using the proposed framework. Displayed is a sequence illustrating a hum
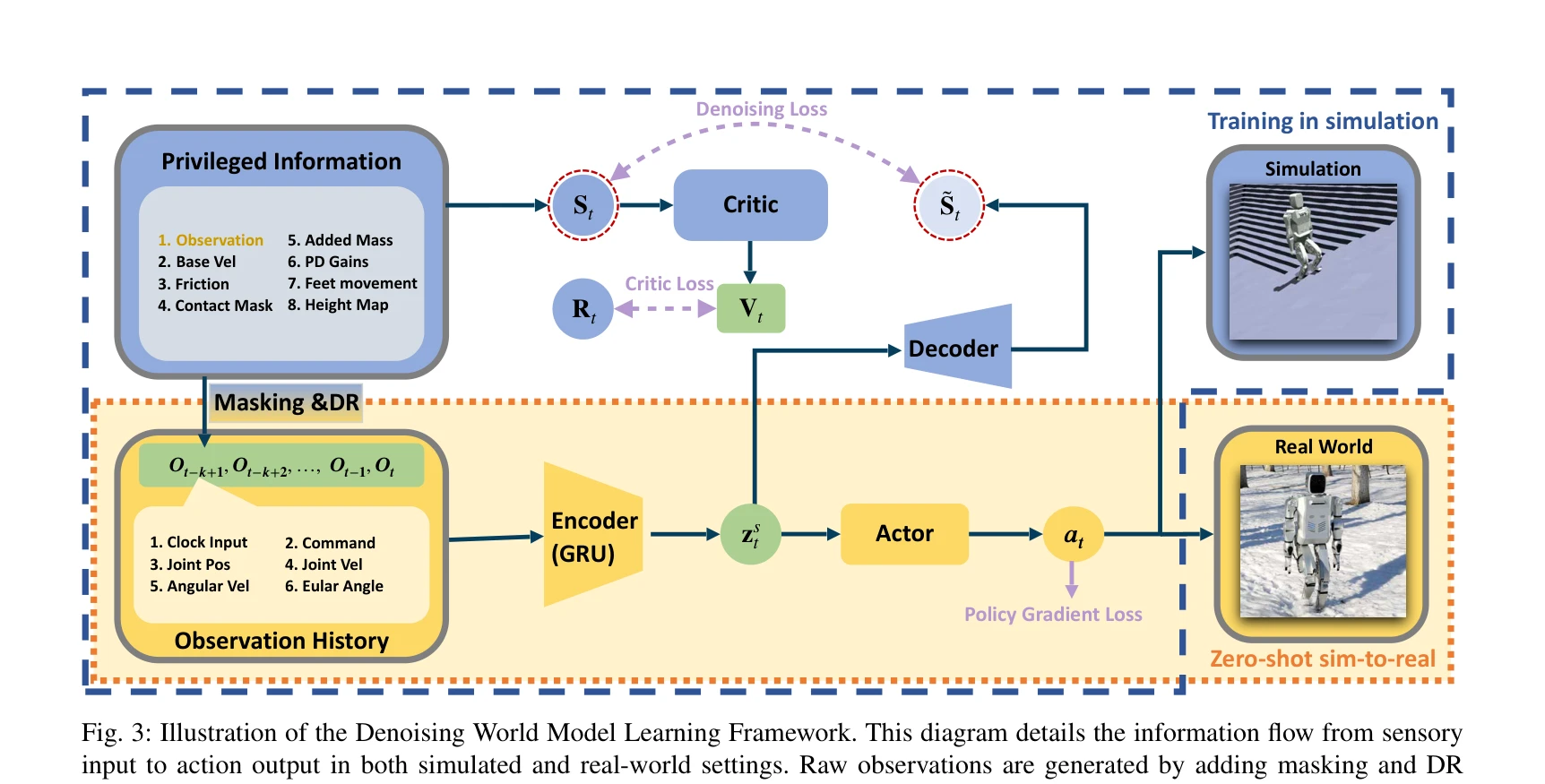
Denoising World Model Learning (DWL)이라는 end-to-end 강화학습 프레임워크를 통해 휴머노이드 로봇이 눈덮인 언덕, 계단, 불규칙한 지형 등 현실의 복잡한 지형을 처음으로 마스터했으며, zero-shot sim-to-real transfer로 같은 신경망을 모든 시나리오에서 구동한다.