Essence
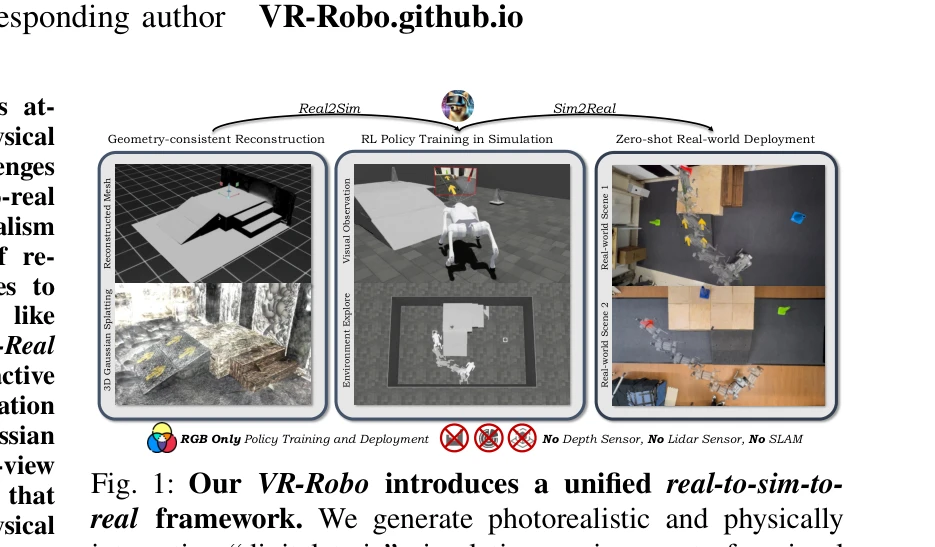
Fig. 1: Our VR-Robo introduces a unified real-to-sim-to-
3D Gaussian Splatting을 활용하여 실제 환경을 포토리얼리스틱한 디지털 트윈으로 재구성하고, 이를 시뮬레이션에 통합하여 RL 기반 시각 네비게이션 정책을 학습한 후 실제 로봇에 무영점 전이하는 Real-to-Sim-to-Real 프레임워크를 제시한다.
저자: Shaoting Zhu, Linzhan Mou, Derun Li, Baijun Ye, Runhan Huang, Hang Zhao | 날짜: 2025-02-03 | URL: https://arxiv.org/abs/2502.01536 📄 PDF
Fig. 1: Our VR-Robo introduces a unified real-to-sim-to-
3D Gaussian Splatting을 활용하여 실제 환경을 포토리얼리스틱한 디지털 트윈으로 재구성하고, 이를 시뮬레이션에 통합하여 RL 기반 시각 네비게이션 정책을 학습한 후 실제 로봇에 무영점 전이하는 Real-to-Sim-to-Real 프레임워크를 제시한다.
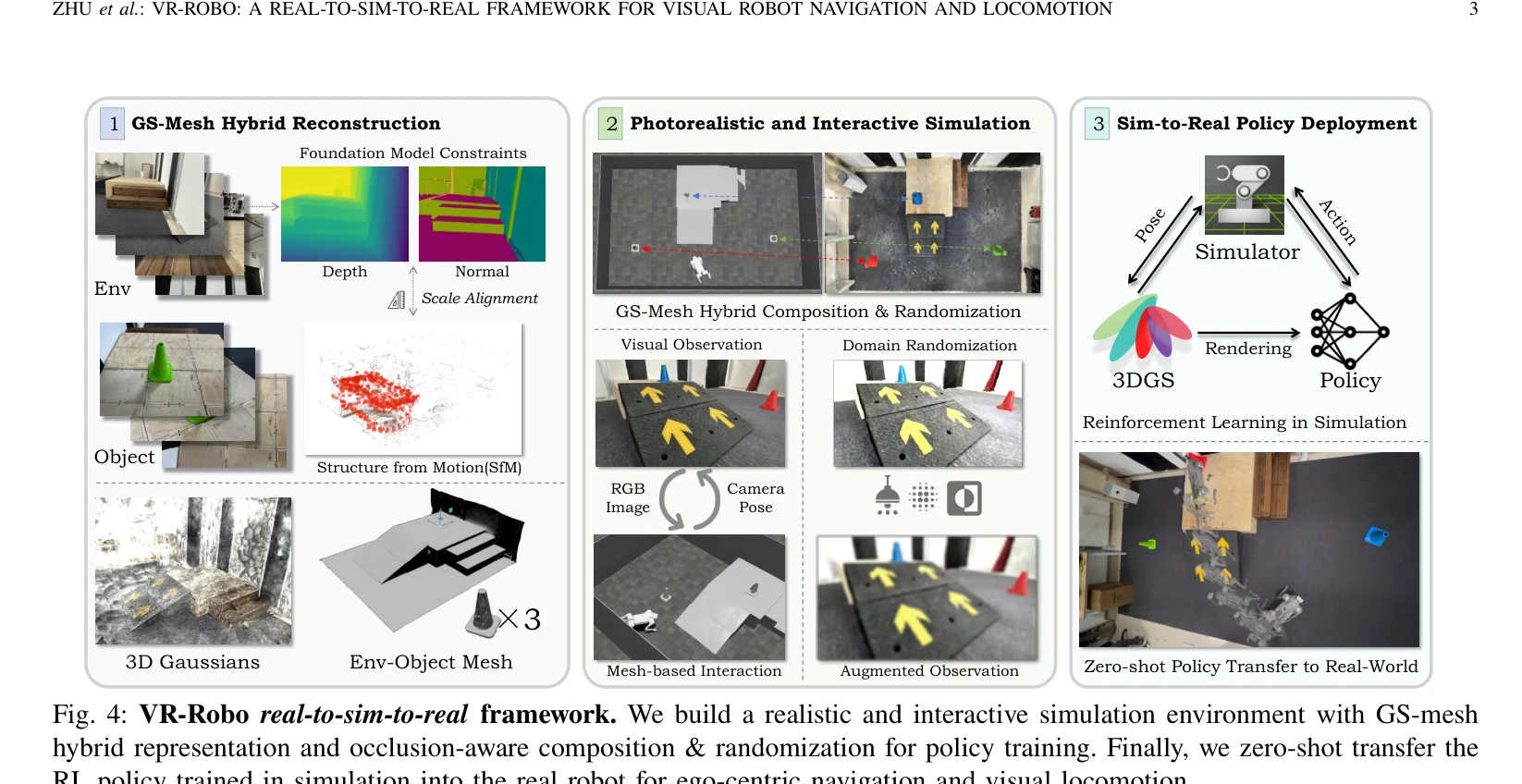
Fig. 4: VR-Robo real-to-sim-to-real framework. We build a realistic and interactive simulation environment with GS-mesh
총평: RGB 기반 시각 네비게이션과 로컬로모션의 sim-to-real 갭을 포토리얼리즘과 물리 상호작용의 결합으로 효과적으로 해결하며, 실제 로봇 배포에서의 무영점 전이를 달성한 실용적이고 창의적인 접근법이다.