저자: Jian Liu, Xiongtao Shi, Thai Duy Nguyen, Haitian Zhang, Tianxiang Zhang, Wei Sun, Yanjie Li, Athanasios V. Vasilakos, Giovanni Iacca, Arshad Ali Khan, Arvind Kumar, Jae Won Cho, Ajmal Mian, Lihua Xie, Erik Cambria, Lin Wang | 날짜: 2025-05-12 | URL: https://arxiv.org/abs/2505.07634 📄 PDF
Essence
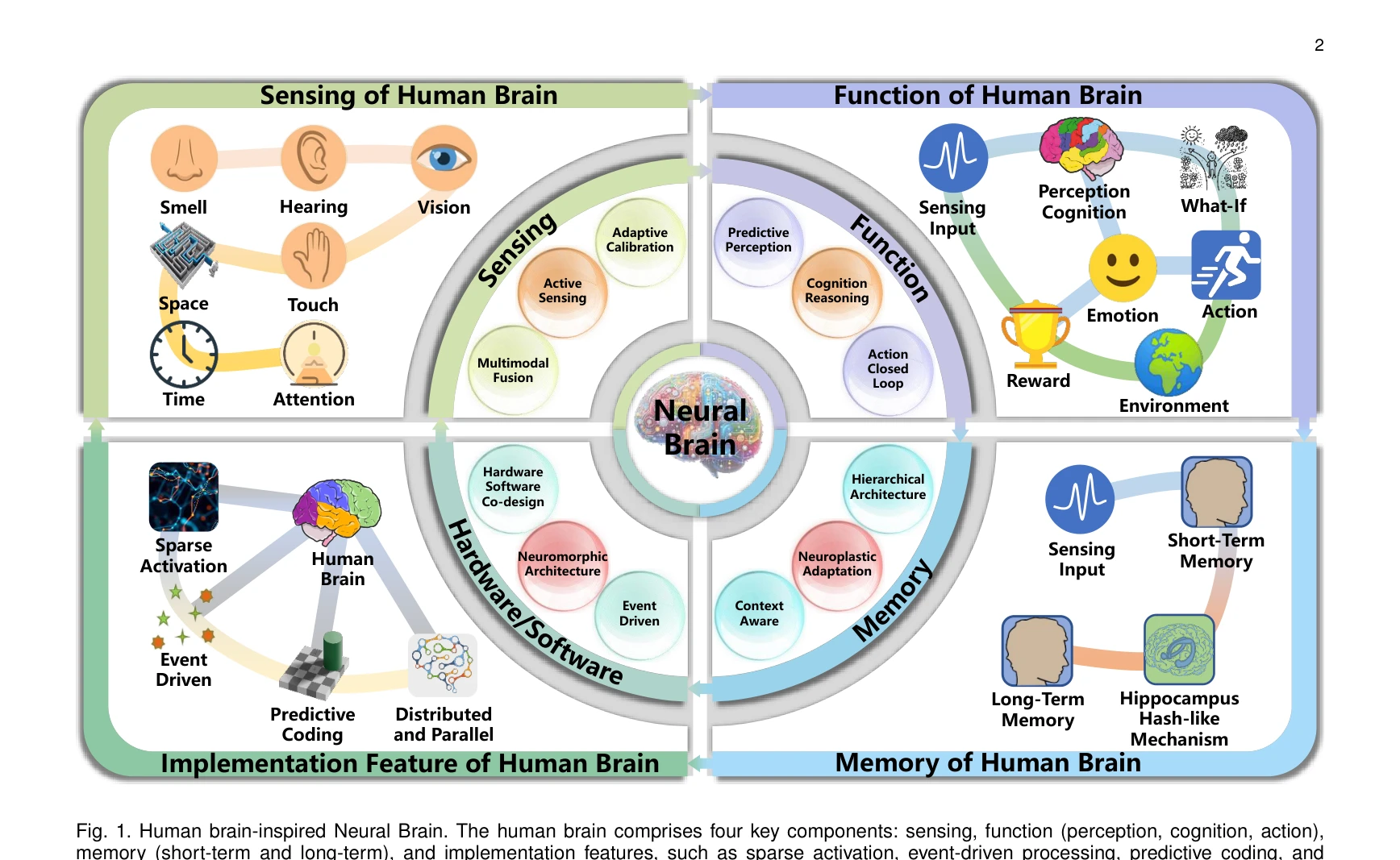
Fig. 1. Human brain-inspired Neural Brain. The human brain comprises four key components: sensing, function (perception,
본 논문은 신경과학에서 영감을 받은 Neural Brain 프레임워크를 제안하여 embodied agent가 인간 수준의 적응성으로 실제 환경과 상호작용할 수 있도록 설계하였다. 이 프레임워크는 multimodal active sensing, perception-cognition-action 기능, neuroplasticity 기반 메모리, neuromorphic hardware/software 최적화를 통합한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 embodied AI의 설계 원칙을 신경과학 기반으로 체계적으로 정립한 중요한 이론적 기여를 제공하며, Neural Brain의 4가지 핵심 모듈을 명확히 정의함으로써 future embodied agent 연구의 통합적 청사진을 제시한다. 다만 구체적인 구현과 실험적 검증이 부족하므로, 실제 robotic system에 대한 end-to-end 적용을 통한 후속 연구로 이 프레임워크의 실효성을 입증할 필요가 있다.