저자: Hao Luo, Ye Wang, Wanpeng Zhang, Sipeng Zheng, Ziheng Xi, Chaoyi Xu, Haiweng Xu, Haoqi Yuan, Chi Zhang, Yiqing Wang, Yicheng Feng, Zongqing Lu | 날짜: 2026-01-19 | URL: https://arxiv.org/abs/2601.12993 📄 PDF
Essence
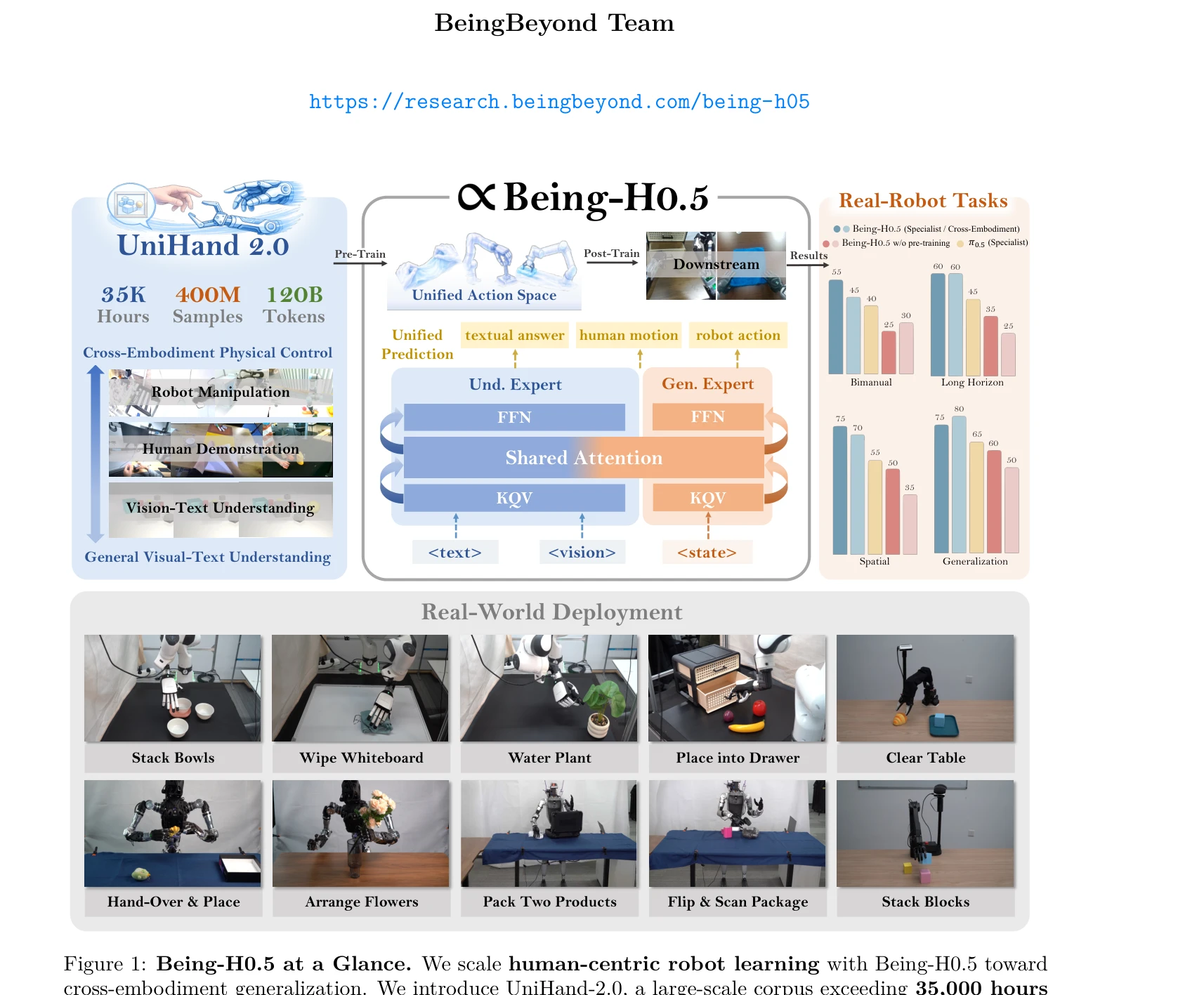
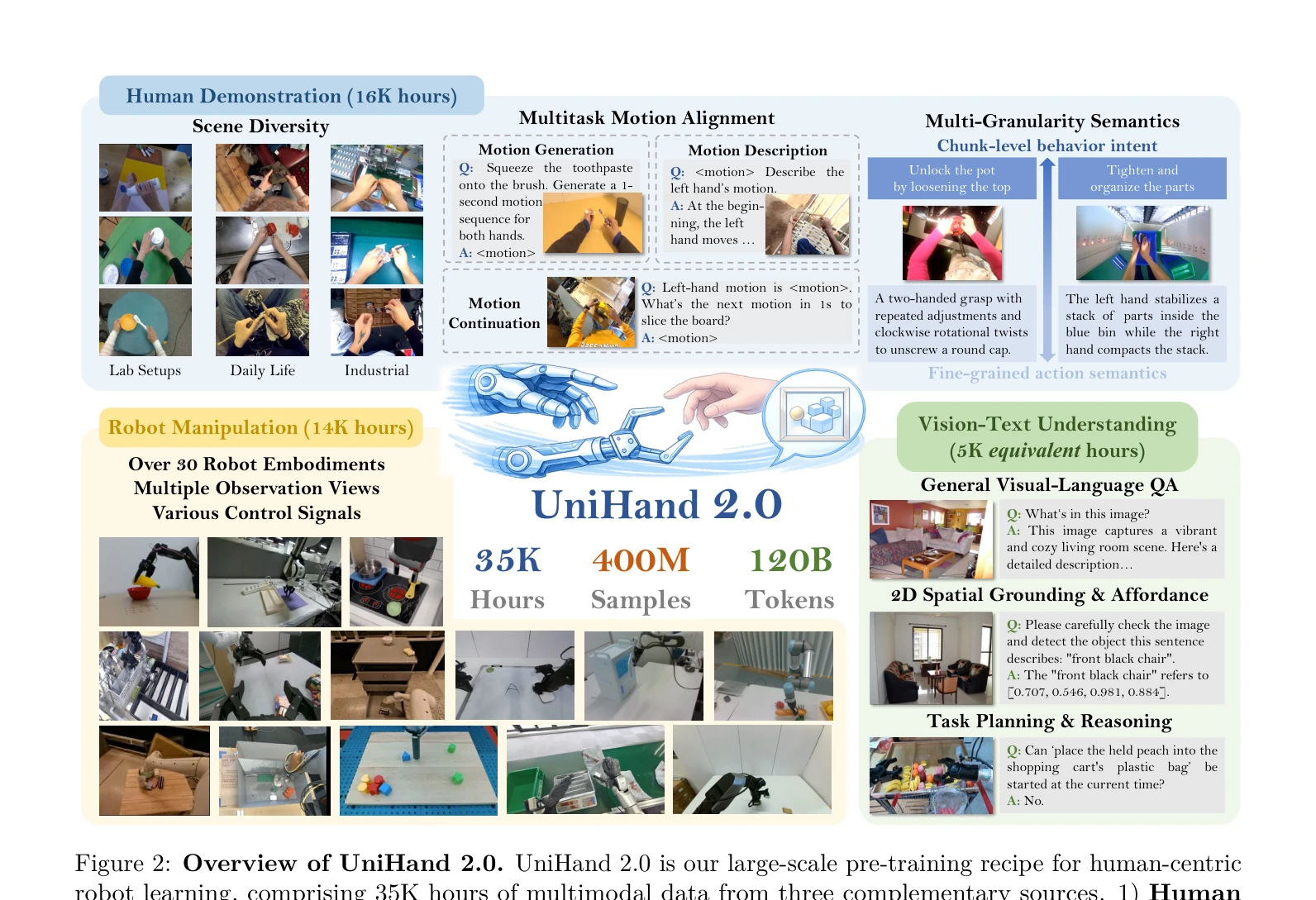
Figure 1: Being-H0.5 at a Glance. We scale human-centric robot learning with Being-H0.5 toward
Being-H0.5는 인간 중심 학습 패러다임과 통합 액션 공간을 활용하여 다양한 로봇 플랫폼 간 일반화를 가능하게 하는 기초 Vision-Language-Action 모델이다. 35,000시간 이상의 멀티모달 데이터로 구성된 UniHand-2.0을 통해 30개의 로봇 플랫폼에서 강력한 cross-embodiment 성능을 달성한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: Being-H0.5는 인간 중심 학습 패러다임과 대규모 통합 데이터셋을 활용하여 cross-embodiment 로봇 일반화의 중요한 진전을 이룬 의미 있는 연구이며, Mixture-of-Flow, Manifold-Preserving Gating 등의 기술 혁신과 실세계 배포 성공이 로봇공학의 확장성 문제를 해결하는 데 기여한다.