ManiFlow: A General Robot Manipulation Policy via Consistency Flow Training
저자: Ge Yan, Jiyue Zhu, Yuquan Deng, Shiqi Yang, Ri-Zhao Qiu, Xuxin Cheng, Marius Memmel, Ranjay Krishna, Ankit Goyal, Xiaolong Wang, Dieter Fox | 날짜: 2025-09-01 | URL: https://arxiv.org/abs/2509.01819📄 PDF
Essence
Figure 2: Policy Architecture of ManiFlow. Our system processes 2D or 3D visual observations,
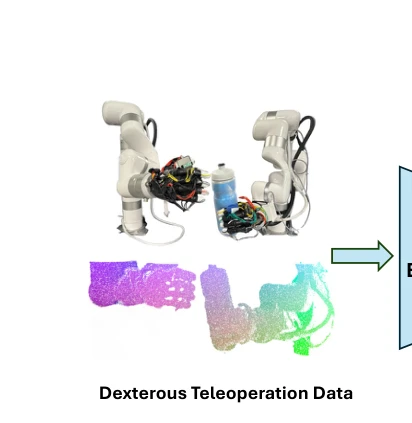
ManiFlow는 flow matching과 consistency training을 결합하여 1-2 inference step으로 고품질의 dexterous action을 생성하는 visuomotor imitation learning policy이다. DiT-X 아키텍처를 통해 visual, language, proprioceptive 입력을 효율적으로 조건화하며 실제 로봇 환경에서 우수한 성능을 보인다.
Motivation
Known: 최근 diffusion-based 및 flow matching 기반 정책 학습이 robot manipulation에서 성과를 보였으나, 기존 flow matching 정책들은 inference 효율성, robustness, 그리고 복잡한 dexterous task에서의 일반화 능력이 제한적이다.
Gap: 기존 flow matching 정책들은 multi-fingered interaction의 복잡성 포착, 시간적 coherence 유지, 미학습 시나리오로의 일반화, 그리고 다중 모달 입력(visual, language, proprioception)을 충분히 모델링하지 못하는 아키텍처 제약이 있다.
Why: 정밀하고 dexterous한 action 생성은 실제 로봇 조작 작업의 핵심이며, inference 효율성과 일반화 능력의 향상은 실무 적용 가능성을 높이고 복잡한 multi-robot 작업의 자동화를 가능하게 한다.
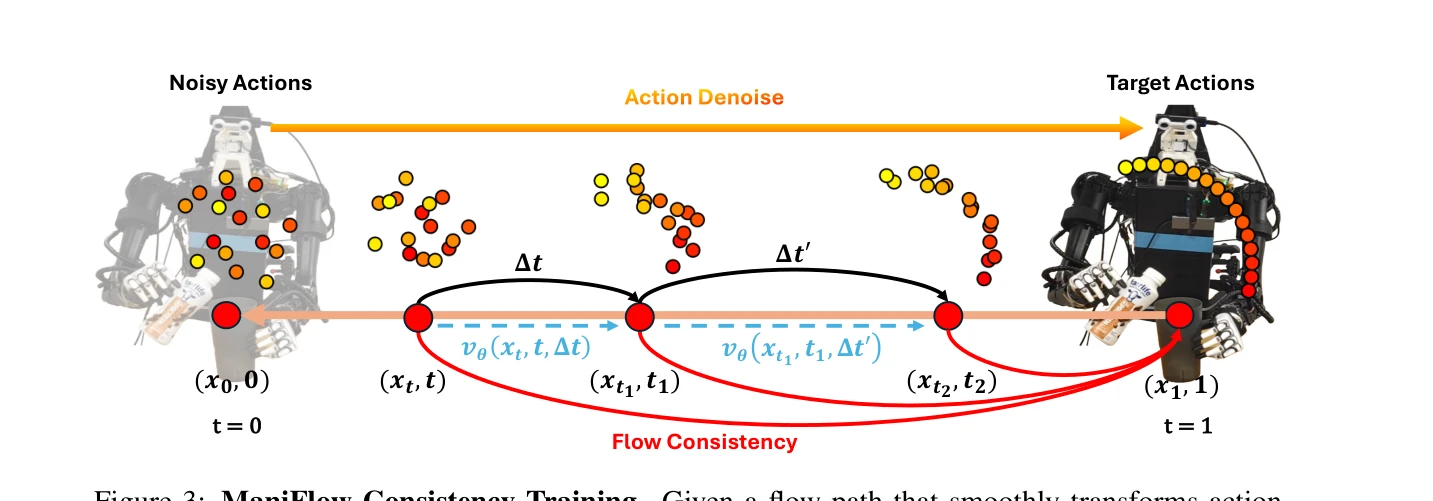
Approach: ManiFlow는 flow matching loss에 continuous-time consistency training objective를 추가하여 flow path를 straighten하고, DiT-X 아키텍처에서 adaptive cross-attention과 AdaLN-Zero conditioning을 통해 다중 모달 입력을 선택적으로 조건화한다.
Achievement
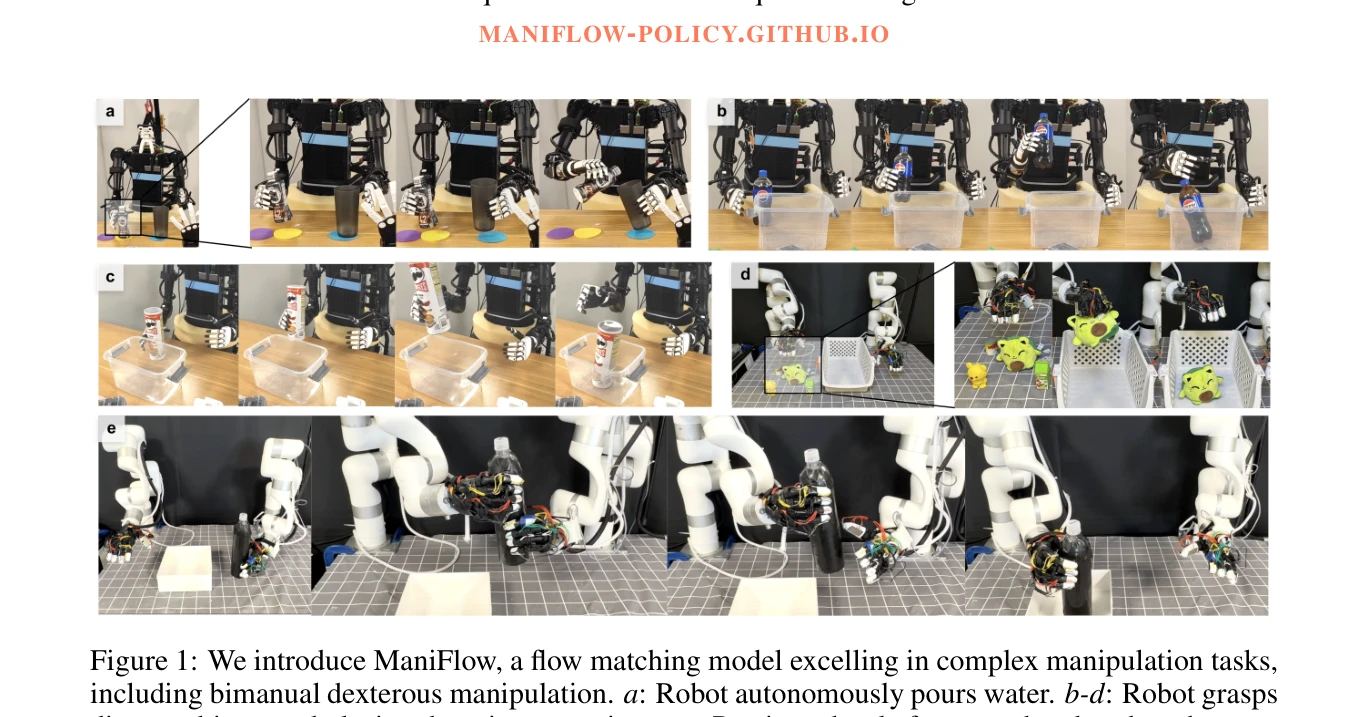
Figure 1: We introduce ManiFlow, a flow matching model excelling in complex manipulation tasks,
Time Space Sampling Strategy: Uniform, logit-normal, mode, CosMap 등 5가지 timestep sampling 전략 비교 및 beta/continuous-time sampling의 우수성 입증
DiT-X 아키텍처: DiT 기반으로 high-dimensional input에는 cross-attention, low-dimensional input에는 AdaLN-Zero conditioning 적용
Multi-modal Conditioning: visual tokens, language tokens, proprioceptive input을 selective feature modulation을 통해 효율적으로 통합
EMA Model: consistency training 안정화를 위해 exponential moving average 기반 teacher model 활용
Joint Optimization: flow matching loss와 consistency training loss를 동시에 최적화하여 효율성과 품질 동시 달성
Originality
Flow matching에 continuous-time consistency training을 처음으로 통합하여 few-step generation 달성
Timestep sampling 전략에 대한 체계적인 ablation study로 flow matching의 설계 원리 규명
DiT-X 아키텍처의 adaptive cross-attention + AdaLN-Zero 조합으로 multi-modal 조건화의 새로운 접근
Teacher model 없이 consistency training을 구현하여 training efficiency 향상
Single-arm, bimanual, humanoid 로봇을 아우르는 포괄적인 실제 환경 평가
Limitation & Further Study
Continuous-time consistency training의 theoretical justification 및 convergence 분석 부족
EMA model의 update frequency와 decay rate에 대한 hyperparameter sensitivity 미분석
시간 예측(temporal consistency) 명시적 메커니즘 부재 - sequence level coherence 검증 필요
계산 복잡도 분석 미흡 - real-time 성능 요구사항 확인 필요
후속 연구: (1) consistency training의 수렴 이론 및 최적 step size 선택 방법 연구, (2) temporal consistency를 명시적으로 enforcing하는 손실함수 개발, (3) 더 복잡한 long-horizon task에서의 성능 평가, (4) 다양한 로봇 형태에 대한 transfer learning 성능 분석
총평: ManiFlow는 flow matching과 consistency training의 효과적인 결합, 체계적인 ablation 분석, 그리고 포괄적인 실제 환경 검증을 통해 robot manipulation 분야에서 상당한 진전을 이루었다. 특히 inference 효율성과 실제 성능의 동시 향상은 실무 적용 가능성을 높이는 중요한 기여이다.