Essence
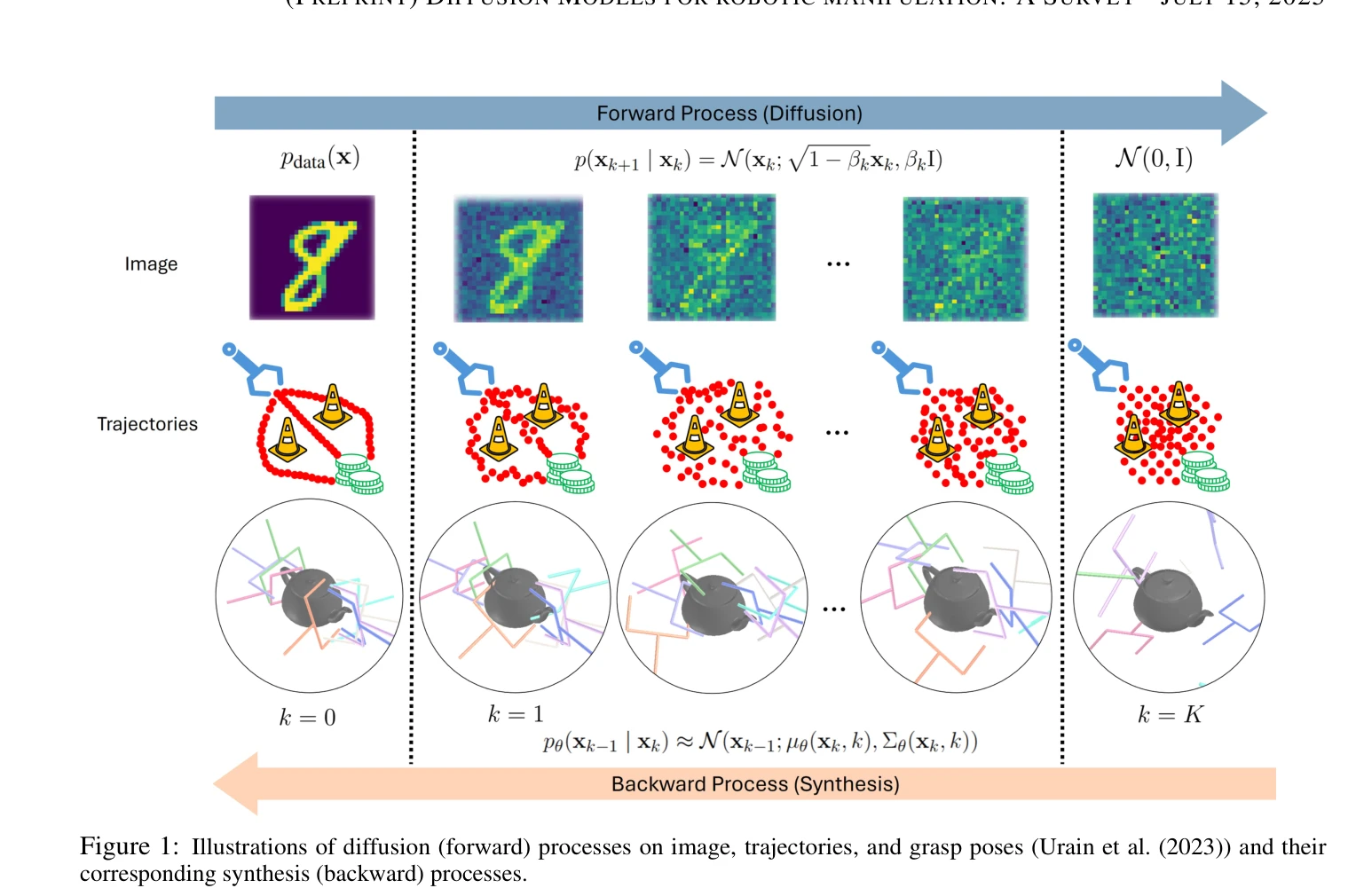
Figure 1: Illustrations of diffusion (forward) processes on image, trajectories, and grasp poses (Urain et al. (2023)) a
본 논문은 로봇 조작(robotic manipulation) 분야에서 diffusion model의 응용을 종합적으로 리뷰하는 첫 번째 survey로, grasp learning, trajectory planning, data augmentation 등의 주요 응용 분야와 학습 프레임워크, 아키텍처를 체계적으로 분류한다.