Essence
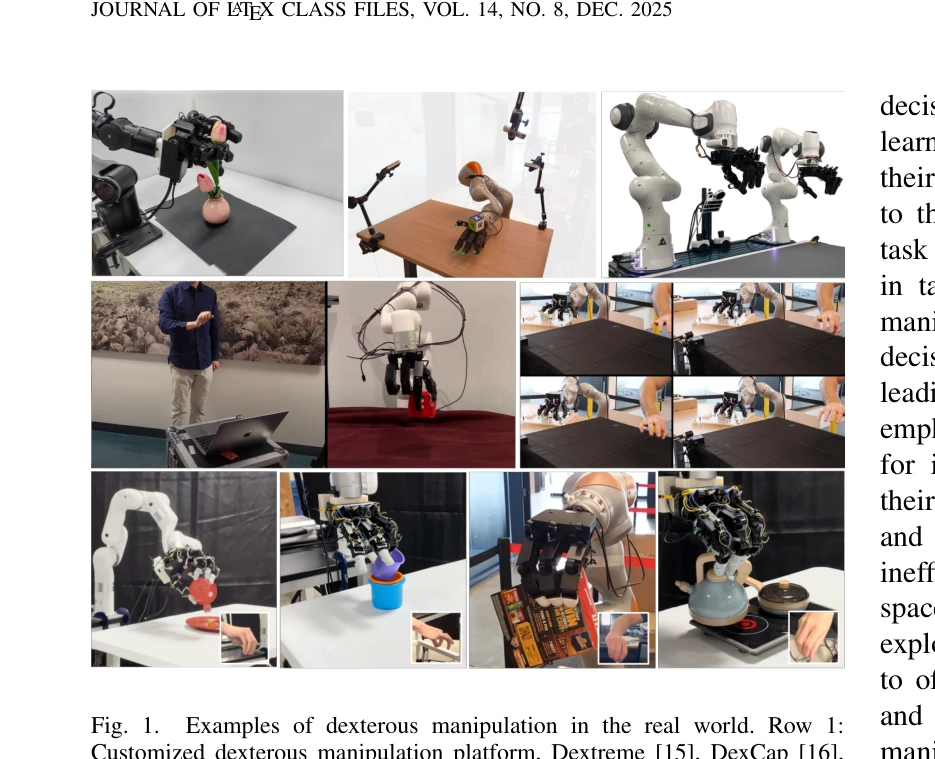
Fig. 1.
본 논문은 Imitation Learning(IL)을 활용한 Dexterous Manipulation 방법들을 종합적으로 조사하는 서베이 논문으로, 전문가 시연을 통해 로봇이 인간 수준의 손재주를 습득하도록 하는 방식을 다룬다.
저자: Shan An, Ziyu Meng, Chao Tang, Yuning Zhou, Tengyu Liu, Fangqiang Ding, Shufang Zhang, Yao Mu, Ran Song, Wei Zhang, Zeng-Guang Hou, Hong Zhang | 날짜: 2025-04-04 | URL: https://arxiv.org/abs/2504.03515 📄 PDF
Fig. 1.
본 논문은 Imitation Learning(IL)을 활용한 Dexterous Manipulation 방법들을 종합적으로 조사하는 서베이 논문으로, 전문가 시연을 통해 로봇이 인간 수준의 손재주를 습득하도록 하는 방식을 다룬다.
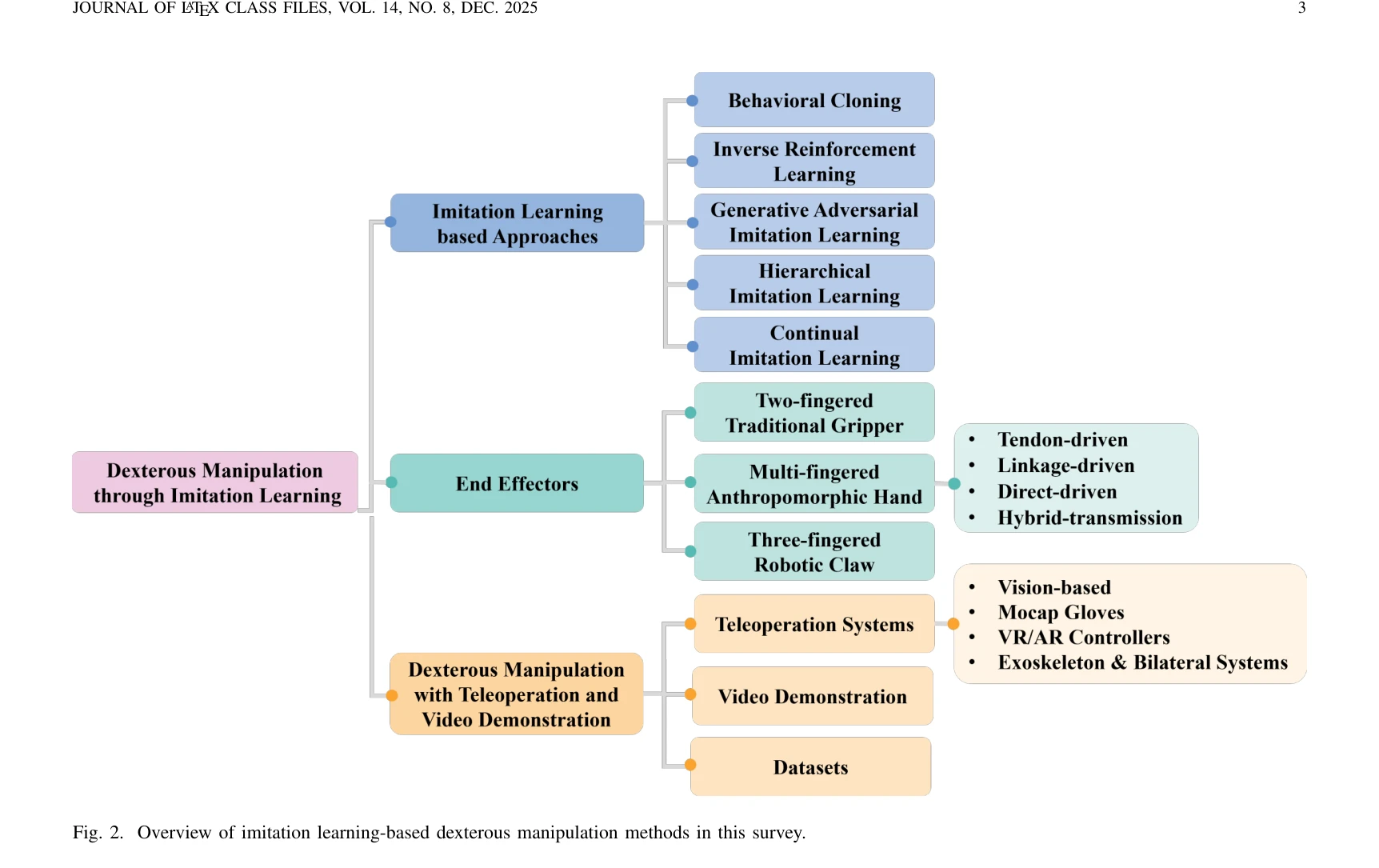
Fig. 2. Overview of imitation learning-based dexterous manipulation methods in this survey.
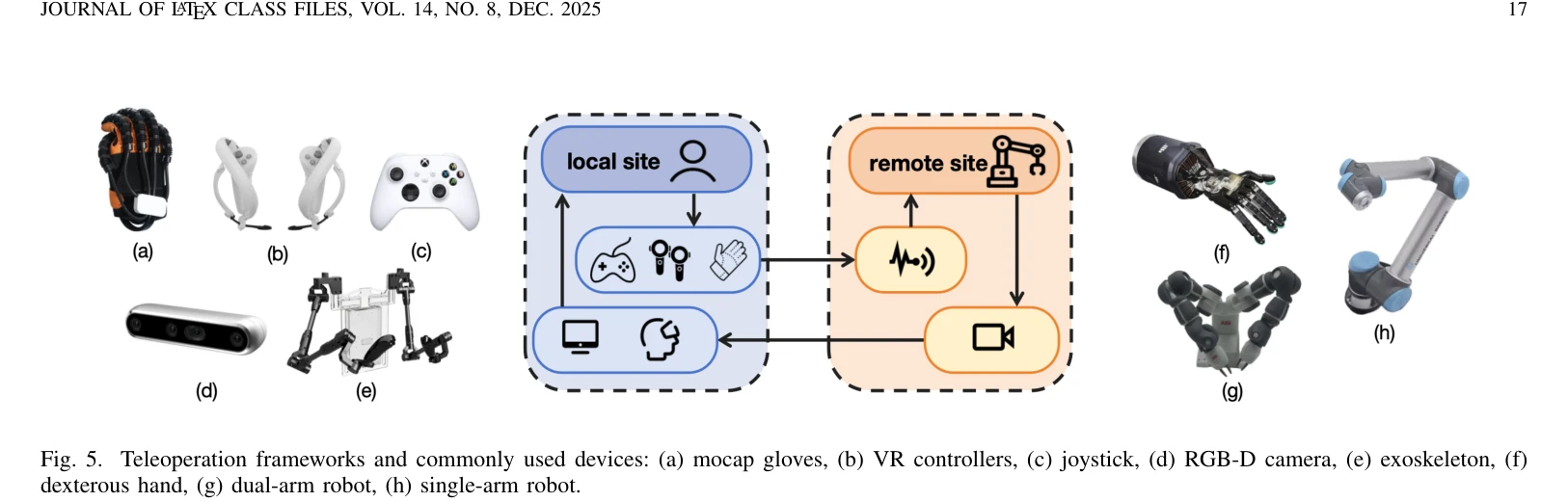
Fig. 5. Teleoperation frameworks and commonly used devices: (a) mocap gloves, (b) VR controllers, (c) joystick, (d) RGB-
총평: 본 서베이는 IL 기반 dexterous manipulation 분야의 포괄적이고 실무적인 가이드를 제공하며, 최근 주요 기술 동향을 잘 정리했으나, 구체적인 기술적 깊이와 정량적 성능 비교는 제한적이다.