Essence
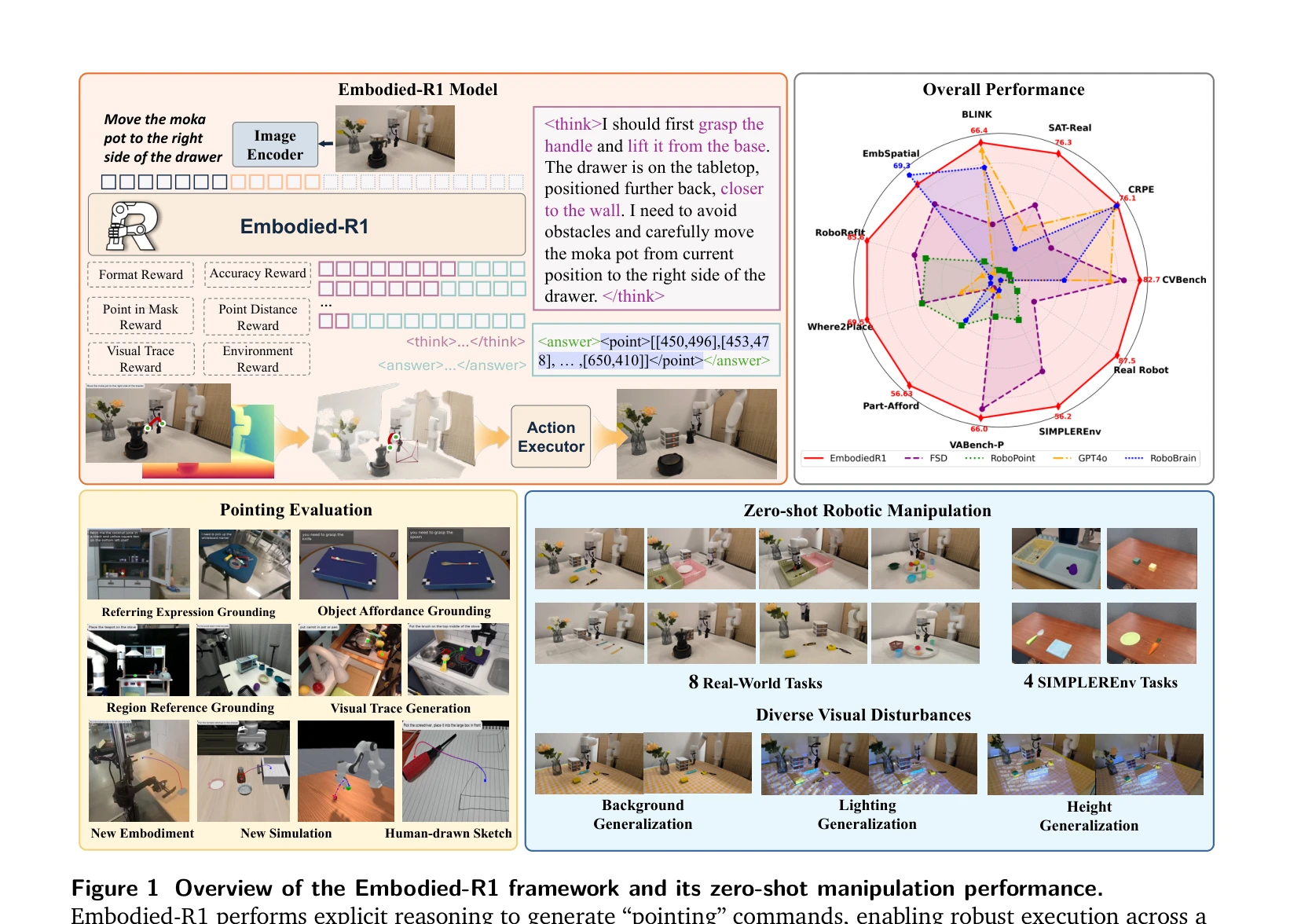
Figure 1 Overview of the Embodied-R1 framework and its zero-shot manipulation performance.
Embodied-R1은 '포인팅'을 통일된 embodiment-agnostic 중간 표현으로 정의하고, Reinforced Fine-tuning(RFT)으로 훈련된 3B VLM으로서 로봇 조작의 perception-action gap을 효과적으로 극복한다.
저자: Yifu Yuan, Haiqin Cui, Yaoting Huang, Yibin Chen, Fei Ni, Zibin Dong, Pengyi Li, Yan Zheng, Hongyao Tang, Jianye Hao | 날짜: 2025-08-19 | URL: https://arxiv.org/abs/2508.13998 📄 PDF
Figure 1 Overview of the Embodied-R1 framework and its zero-shot manipulation performance.
Embodied-R1은 '포인팅'을 통일된 embodiment-agnostic 중간 표현으로 정의하고, Reinforced Fine-tuning(RFT)으로 훈련된 3B VLM으로서 로봇 조작의 perception-action gap을 효과적으로 극복한다.
Figure 1 Overview of the Embodied-R1 framework and its zero-shot manipulation performance.
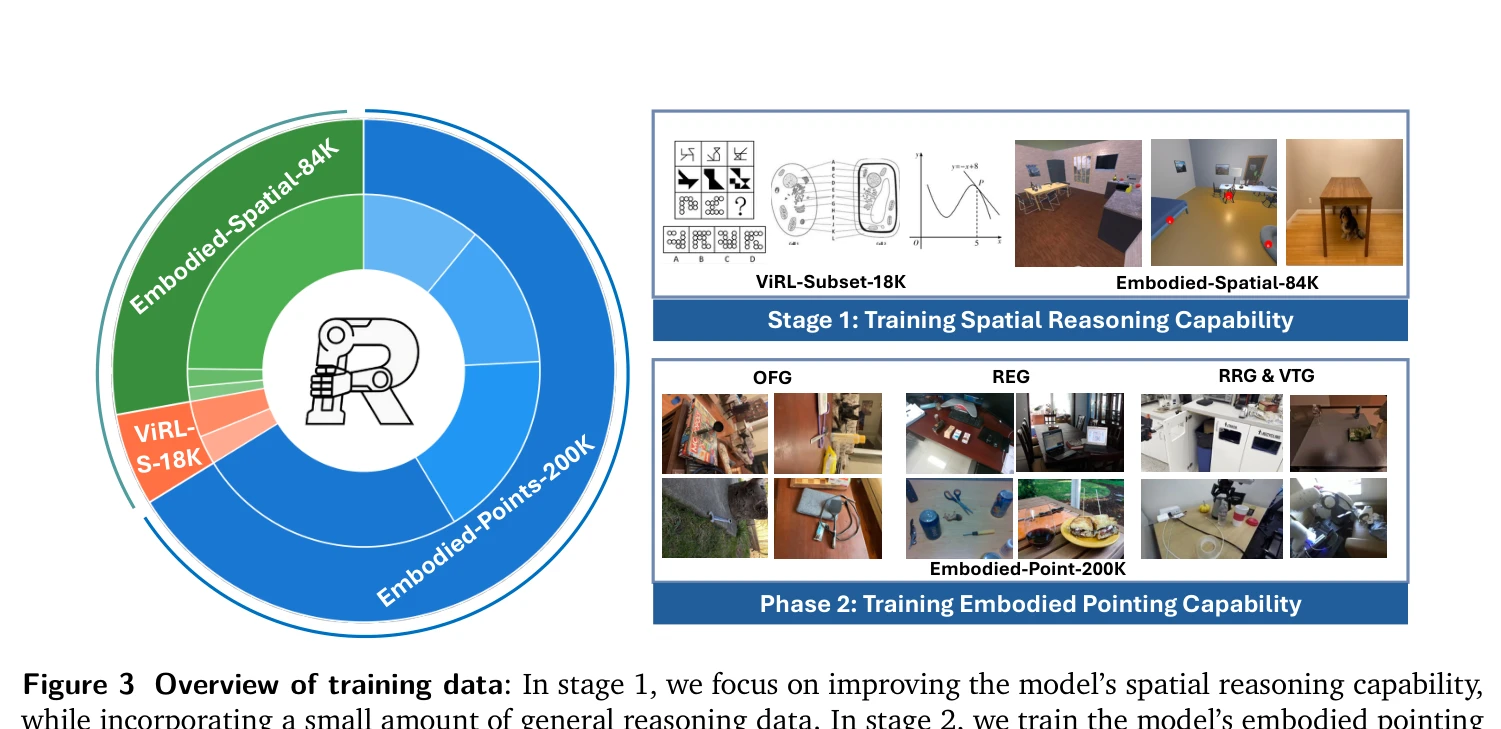
Figure 3 Overview of training data: In stage 1, we focus on improving the model’s spatial reasoning capability,
총평: Embodied-R1은 포인팅이라는 명확한 중간 표현과 RFT 기반 훈련 방식으로 embodied AI의 오래된 perception-action gap 문제에 우아한 해결책을 제시하며, 실제 로봇에서의 강력한 zero-shot 성능으로 그 실질적 가치를 입증한다.