저자: Siyuan Huang, Iaroslav Ponomarenko, Zhengkai Jiang, Xiaoqi Li, Xiaobin Hu, Peng Gao, Hongsheng Li, Hao Dong | 날짜: 2024-03-17 | URL: https://arxiv.org/abs/2403.11289 📄 PDF
Essence
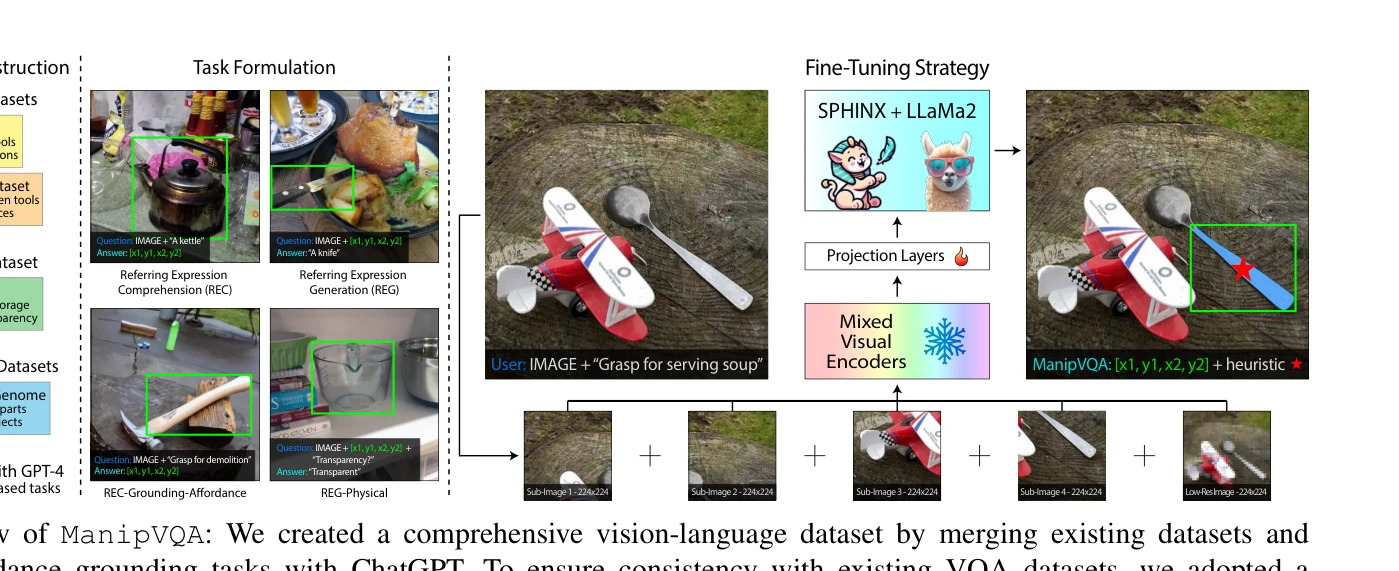
Fig. 2: Overview of ManipVQA: We created a comprehensive vision-language dataset by merging existing datasets and
ManipVQA는 Multi-Modal Large Language Model (MLLM)에 로봇 조작 작업을 위한 affordance 인식과 물리적 개념 이해를 주입하는 프레임워크이다. Visual Question-Answering 형식의 통합 데이터셋과 fine-tuning 전략을 통해 로봇 조작 성능을 향상시킨다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: ManipVQA는 MLLM을 로봇 조작 작업에 적응시키기 위한 포괄적이고 창의적인 접근법을 제시하며, unified VQA format과 통합된 robotic dataset을 통해 affordance 이해와 물리적 추론 능력을 효과적으로 주입한다. 코드와 데이터셋 공개를 통해 연구 커뮤니티에 의미 있는 기여를 하지만, 실제 로봇에서의 검증과 더 광범위한 도메인으로의 확장이 필요하다.