Essence
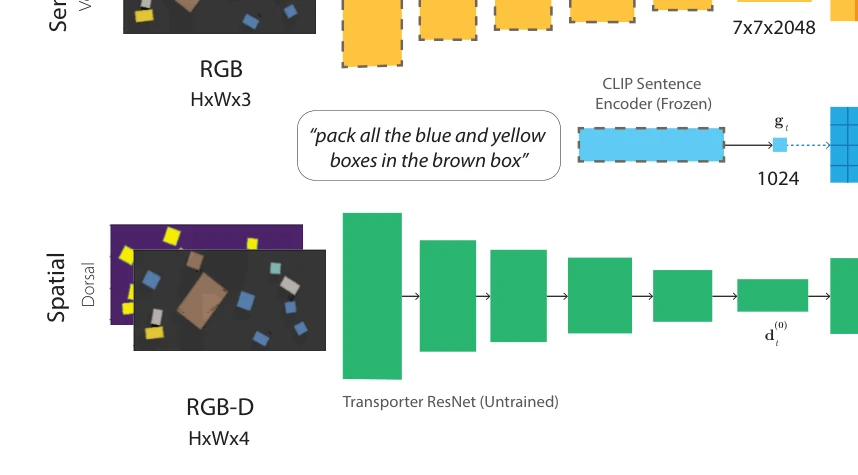
Figure 2. CLIPORT Two-Stream Architecture. An overview of the semantic and spatial streams. The semantic stream uses a f
CLIPort는 CLIP의 의미론적 이해(what)와 Transporter의 공간적 정밀성(where)을 결합한 두 스트림 아키텍처를 통해, 자연어 명령으로 조건화된 로봇 조작 에이전트를 제시한다.
저자: Mohit Shridhar, Lucas Manuelli, Dieter Fox | 날짜: 2021-09-24 | URL: https://arxiv.org/abs/2109.12098 📄 PDF
Figure 2. CLIPORT Two-Stream Architecture. An overview of the semantic and spatial streams. The semantic stream uses a f
CLIPort는 CLIP의 의미론적 이해(what)와 Transporter의 공간적 정밀성(where)을 결합한 두 스트림 아키텍처를 통해, 자연어 명령으로 조건화된 로봇 조작 에이전트를 제시한다.

Figure 1. Language-Conditioned Manipulation Tasks: CLIPORT is a broad framework applicable to a wide range of language-c
Figure 2. CLIPORT Two-Stream Architecture. An overview of the semantic and spatial streams. The semantic stream uses a f
총평: CLIPort는 대규모 사전학습 vision-language 모델을 정밀 로봇 조작과 효과적으로 결합하여 언어-조건화 멀티태스크 학습의 새로운 패러다임을 제시했으며, 실제 로봇에서의 데이터 효율성과 의미론적 일반화 능력은 로봇 조작 분야에 상당한 실질적 기여를 한다.