Essence
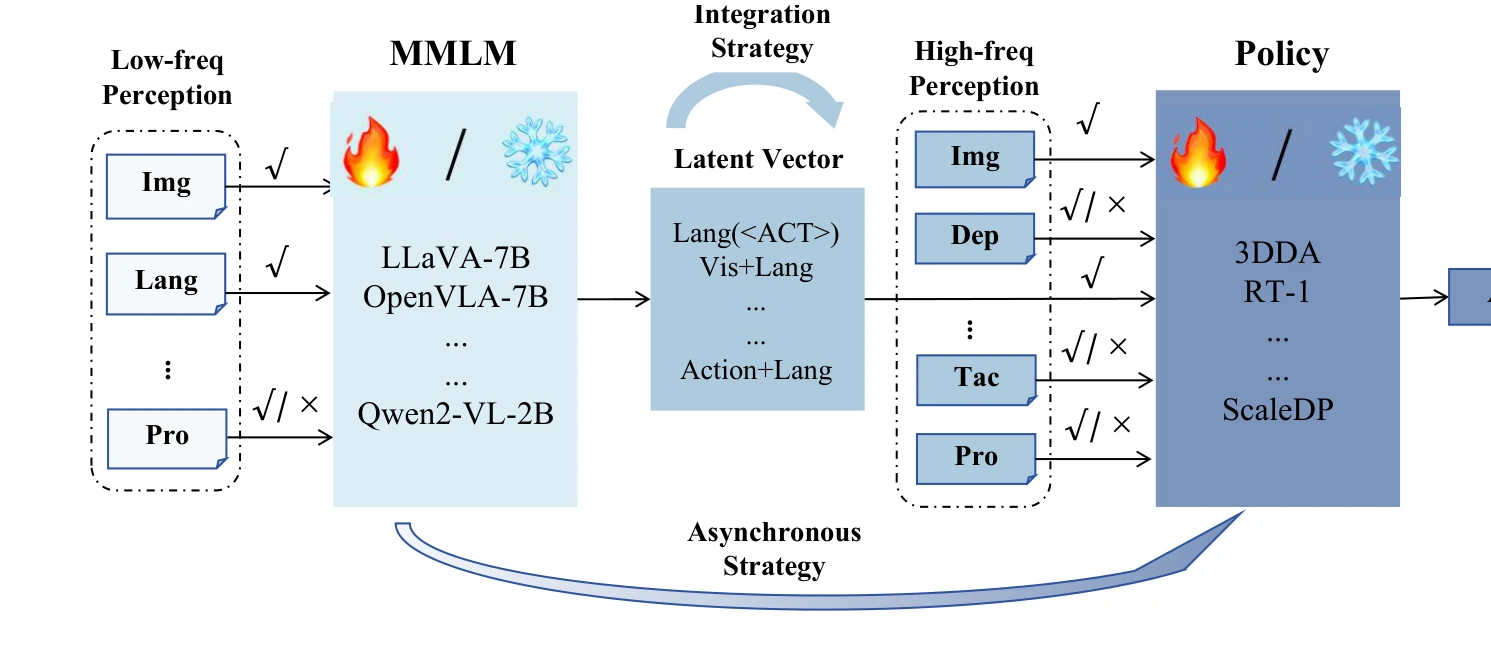
Figure 1. Key Design of Dual-System VLAs. It mainly includes: MMLM Selection, Policy Selection, Latent Feature Represent
Dual-System VLA 아키텍처의 구조를 비교 분석하고 핵심 설계 요소를 경험적으로 평가하여 로봇 조작을 위한 오픈소스 dual-system VLA 모델을 제공한다.
저자: Can Cui, Pengxiang Ding, Wenxuan Song, Shuanghao Bai, Xinyang Tong, Zirui Ge, Runze Suo, Wanqi Zhou, Yang Liu, Bofang Jia, Han Zhao, Siteng Huang, Donglin Wang | 날짜: 2025-05-06 | URL: https://arxiv.org/abs/2505.03912 📄 PDF
Figure 1. Key Design of Dual-System VLAs. It mainly includes: MMLM Selection, Policy Selection, Latent Feature Represent
Dual-System VLA 아키텍처의 구조를 비교 분석하고 핵심 설계 요소를 경험적으로 평가하여 로봇 조작을 위한 오픈소스 dual-system VLA 모델을 제공한다.
Figure 1. Key Design of Dual-System VLAs. It mainly includes: MMLM Selection, Policy Selection, Latent Feature Represent
Figure 1. Key Design of Dual-System VLAs. It mainly includes: MMLM Selection, Policy Selection, Latent Feature Represent
총평: Dual-System VLA에 대한 최초의 포괄적 설문과 체계적 경험적 분석을 제공하며, 오픈소스 구현으로 커뮤니티 기여도 가능하나, 발표된 발췌에서는 구체적 실험 결과 부재로 평가 강도를 완전히 판단하기 어렵다.