Essence

Fig. 1: The top image displays the humanoid robot Adam walking on unseen terrain,
인간의 보행 데이터를 활용한 모방 학습 프레임워크를 통해 풀사이즈 휴머노이드 로봇 Adam이 인간 수준의 보행 성능을 달성하는 방법을 제시한다.
저자: Qiang Zhang, Peter Cui, David Yan, Jingkai Sun, Yiqun Duan, Gang Han, Wen Zhao, Weining Zhang, Yijie Guo, Arthur Zhang, Renjing Xu | 날짜: 2024-02-28 | URL: https://arxiv.org/abs/2402.18294 📄 PDF
Fig. 1: The top image displays the humanoid robot Adam walking on unseen terrain,
인간의 보행 데이터를 활용한 모방 학습 프레임워크를 통해 풀사이즈 휴머노이드 로봇 Adam이 인간 수준의 보행 성능을 달성하는 방법을 제시한다.
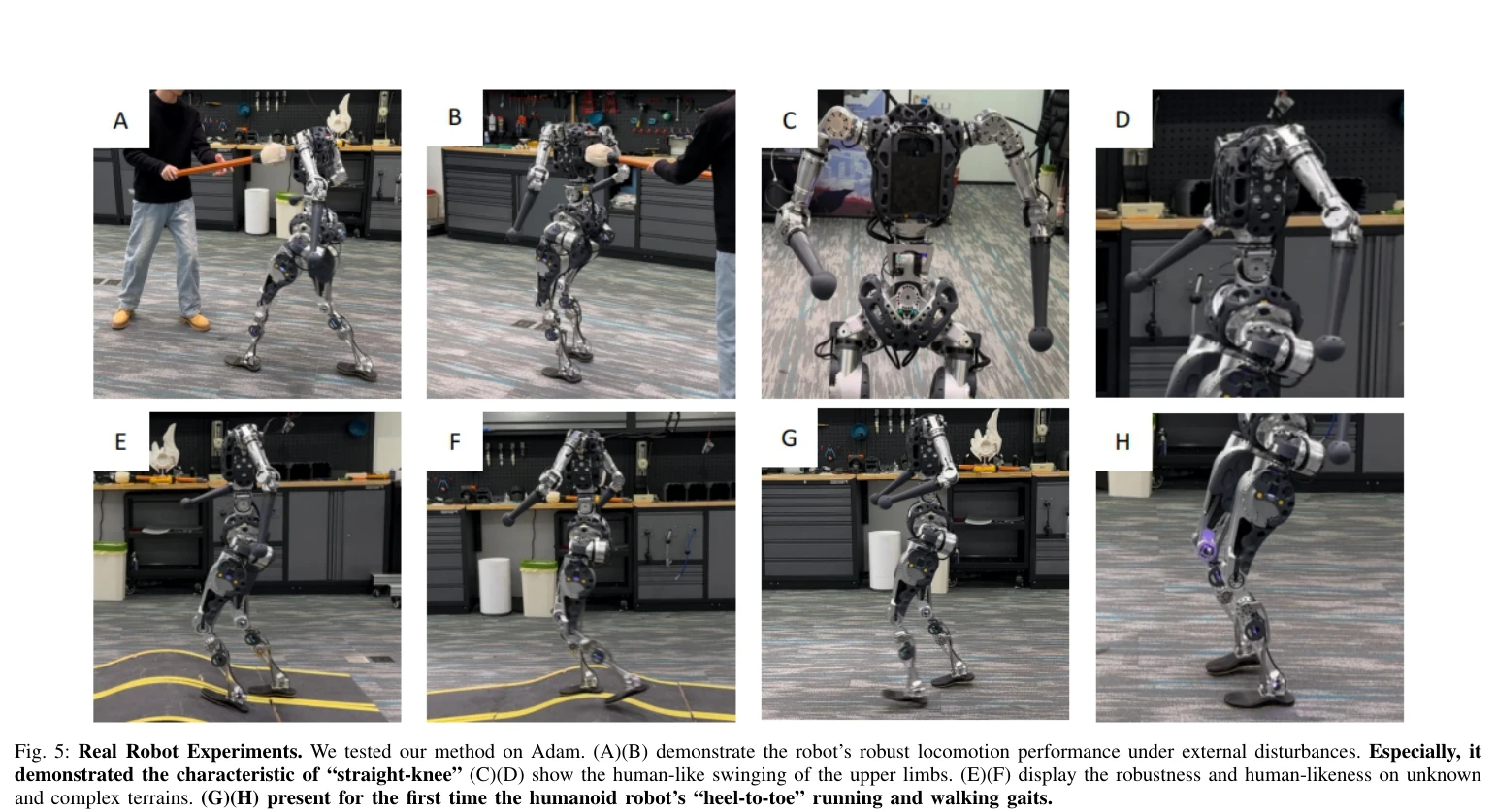
Fig. 5: Real Robot Experiments. We tested our method on Adam. (A)(B) demonstrate the robot’s robust locomotion performan
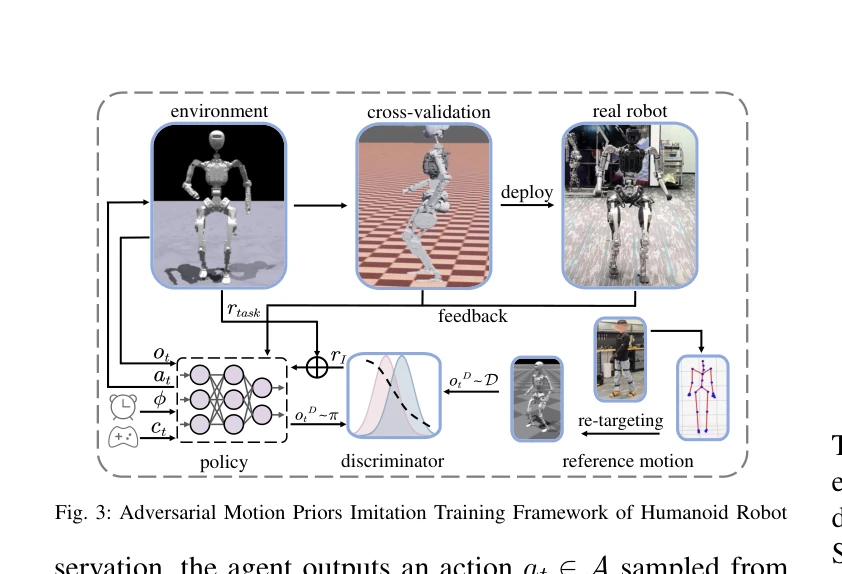
Fig. 3: Adversarial Motion Priors Imitation Training Framework of Humanoid Robot
총평: 휴머노이드 로봇 제어의 오래된 과제(복잡한 보상 함수, Sim2Real 간극)를 인간 모방 학습으로 효과적으로 해결하고 풀사이즈 로봇에서 첫 성공을 달성한 중요한 연구이다. 다만 정량적 평가 지표 부족과 경쟁 로봇과의 비교 분석이 보강되면 더욱 강력한 논문이 될 수 있다.